three_body_ode, a Python code which defines a set of ordinary differential equations (ODE) which simulates the behavior of three planets, constrained to lie in a plane, and moving under the influence of gravity, by Walter Gander and Jiri Hrebicek.
Three bodies, regarded as point masses, are constrained to lie in a plane. The masses of each body are given, as are the positions and velocities at a starting time T = 0. The bodies move in accordance with the gravitational force between them.
The force exerted on the 0-th body by the 1st body can be written:
F = - m0 m1 ( p0 - p1 ) / |p0 - p1|^3
assuming that units have been normalized to that the gravitational
coefficient is 1. Newton's laws of motion can be written:
m0 p0'' = - m0 m1 ( p0 - p1 ) / |p0 - p1|^3
- m0 m2 ( p0 - p2 ) / |p0 - p2|^3
m1 p1'' = - m1 m0 ( p1 - p0 ) / |p1 - p0|^3
- m1 m2 ( p1 - p2 ) / |p1 - p2|^3
m2 p2'' = - m2 m0 ( p2 - p0 ) / |p2 - p0|^3
- m2 m1 ( p2 - p1 ) / |p2 - p1|^3
Letting
y1 = p0(x)
y2 = p0(y)
y3 = p0'(x)
y4 = p0'(y)
and using similar definitions for p1 and p2, the 3 second order vector
equations can be rewritten as 12 first order equations. In particular,
the first four are:
y1' = y3
y2' = y4
y3' = - m1 ( y1 - y5 ) / |(y1,y2) - (y5,y6) |^3
- m2 ( y1 - y9 ) / |(y1,y2) - (y9,y10)|^3
y4' = - m1 ( y2 - y6 ) / |(y1,y2) - (y5,y6) |^3
- m2 ( y2 - y10 ) / |(y1,y2) - (y9,y10)|^3
and so on.
This first order system can be integrated by a standard ODE solver.
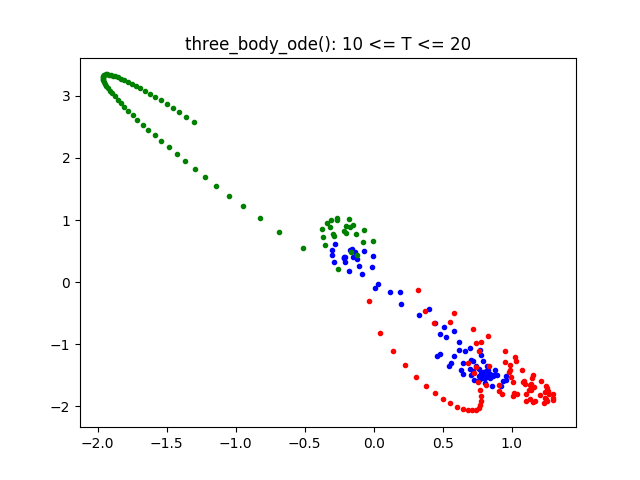
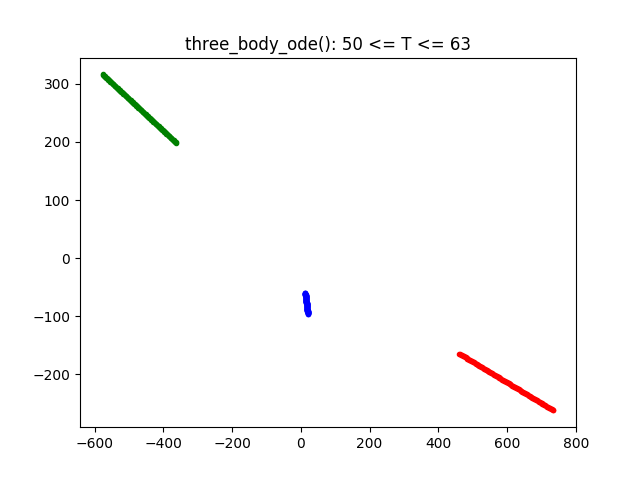
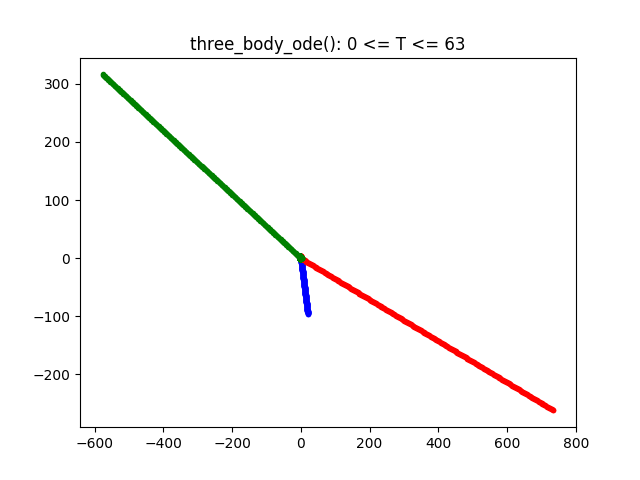
Note that when any two bodies come close together, the solution changes very rapidly, and very small steps must be taken by the ODE solver. For this system, the first near collision occurs around T=15.8299, and the results will not be very accurate after that point.
The information on this web page is distributed under the MIT license.
three_body_ode is available in a C version and a C++ version and a Fortran90 version and a MATLAB version and an Octave version and a Python version.
python_ode, Python codes which sets up various systems of ordinary differential equations (ODE).
Original MATLAB version by Dominik Gruntz, Joerg Waldvogel. This version by John Burkardt.
{kind=link}
{kind=link}
{kind=link}
{kind=link}