lagrange_interp_1d, a Python code which defines and evaluates the Lagrange polynomial p(x) which interpolates a set of data, so that p(x(i)) = y(i).
The information on this web page is distributed under the MIT license.
lagrange_interp_1d is available in a C version and a C++ version and a Fortran90 version and a MATLAB version and an Octave version and a Python version.
barycentric_interp_1d, a Python code which defines and evaluates the barycentric Lagrange polynomial p(x) which interpolates a set of data, so that p(x(i)) = y(i). The barycentric approach means that very high degree polynomials can safely be used.
chebyshev, a Python code which computes the Chebyshev interpolant or approximant to a given function over an interval.
chebyshev_interp_1d, a python code which determines the combination of Chebyshev polynomials which interpolates a set of data, so that p(x(i)) = y(i).
nearest_interp_1d, a python code which interpolates a set of data using a piecewise constant interpolant defined by the nearest neighbor criterion.
newton_interp_1d, a python code which finds a polynomial interpolant to data using Newton divided differences.
pwl_interp_1d, a python code which interpolates a set of data using a piecewise linear function.
rbf_interp_1d, a python code which defines and evaluates radial basis function (RBF) interpolants to 1d data.
shepard_interp_1d, a python code which defines and evaluates Shepard interpolants to 1d data, based on inverse distance weighting.
test_interp_1d, a python code which defines test problems for interpolation of data y(x), depending on a 2d argument.
vandermonde_interp_1d, a python code which finds a polynomial interpolant to data y(x) of a 1d argument, by setting up and solving a linear system for the polynomial coefficients, involving the Vandermonde matrix.
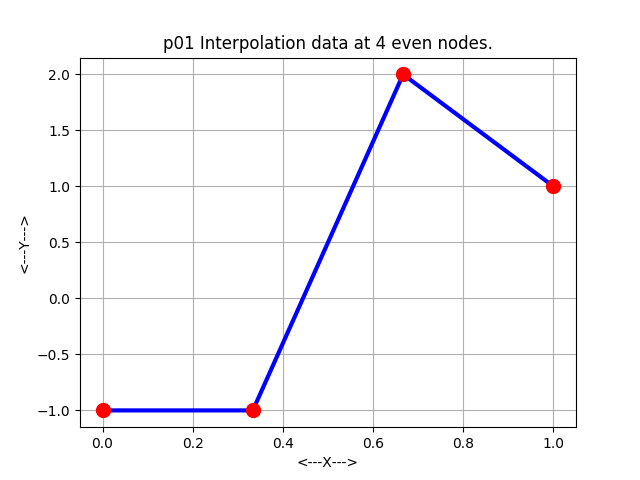
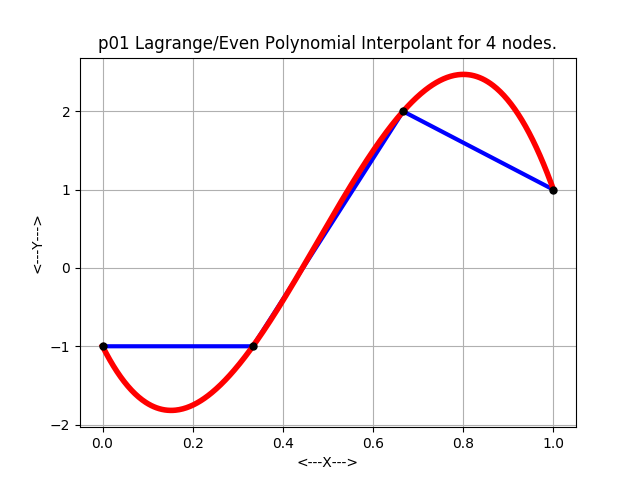
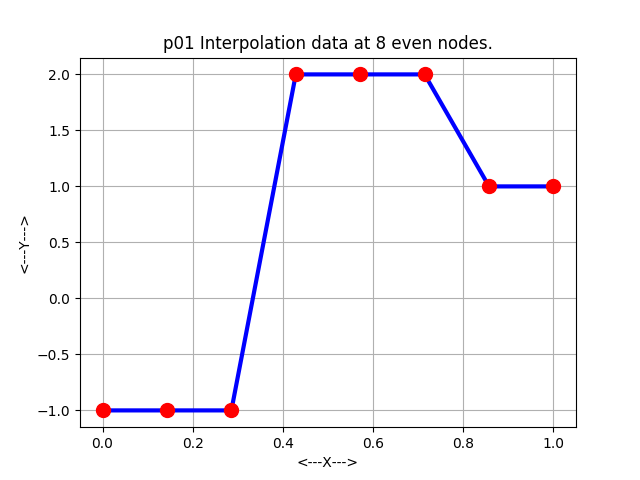
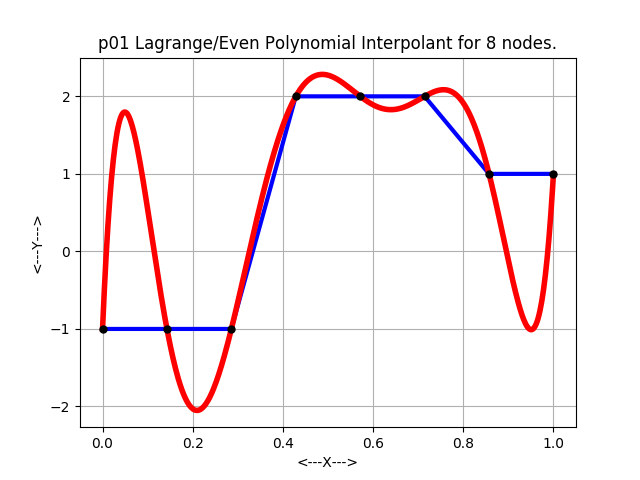
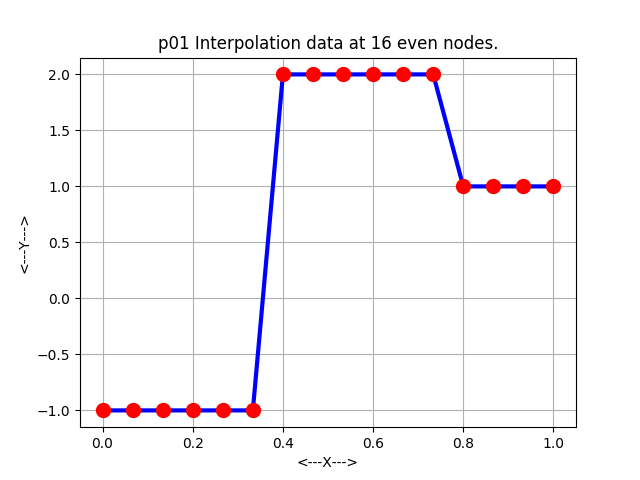
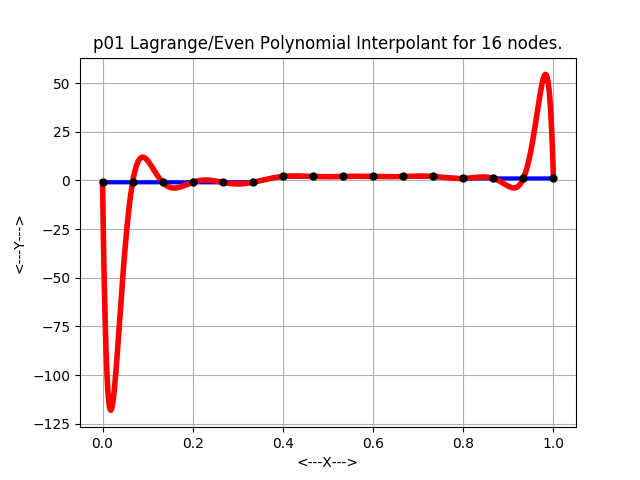
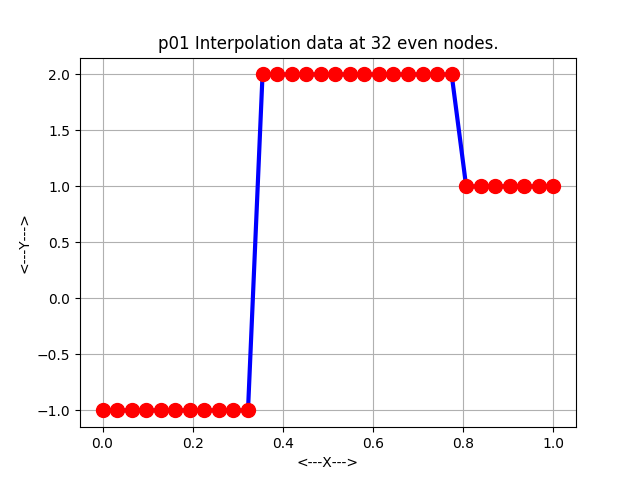
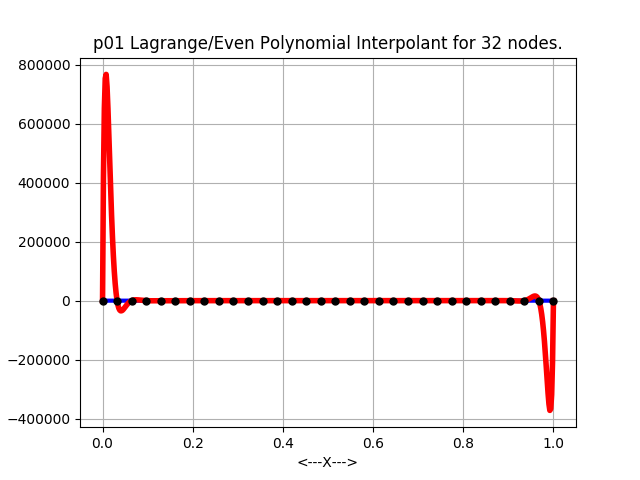
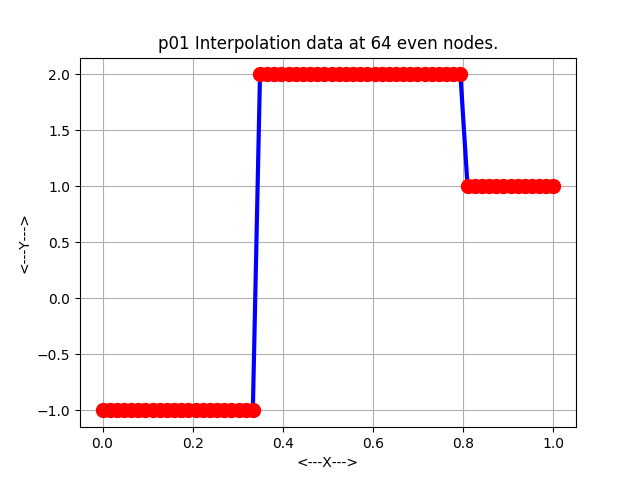
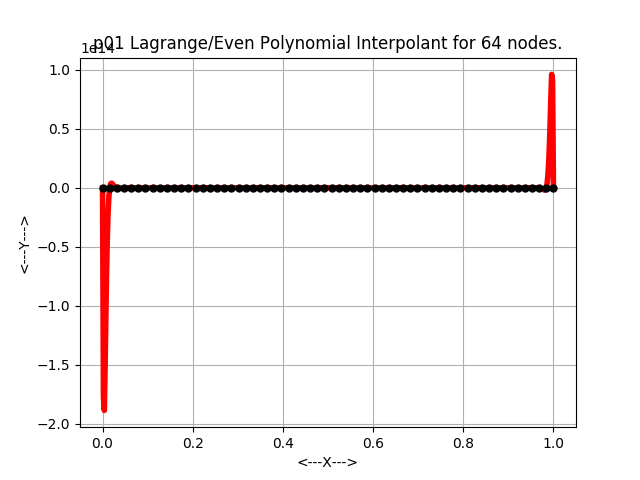
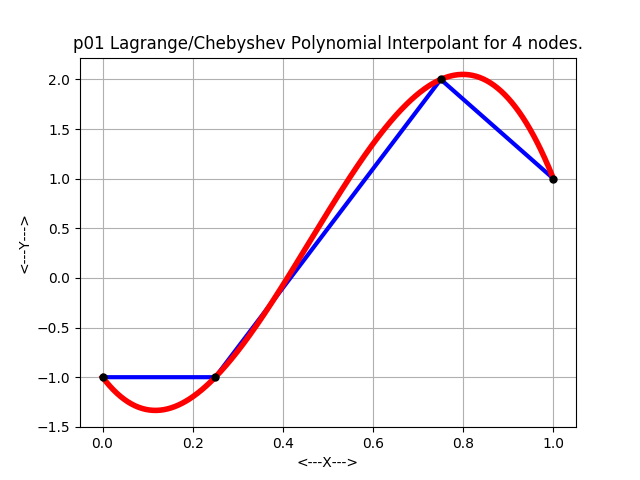
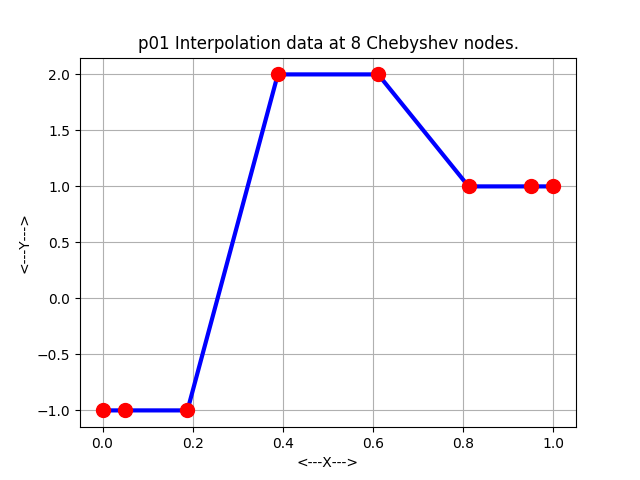
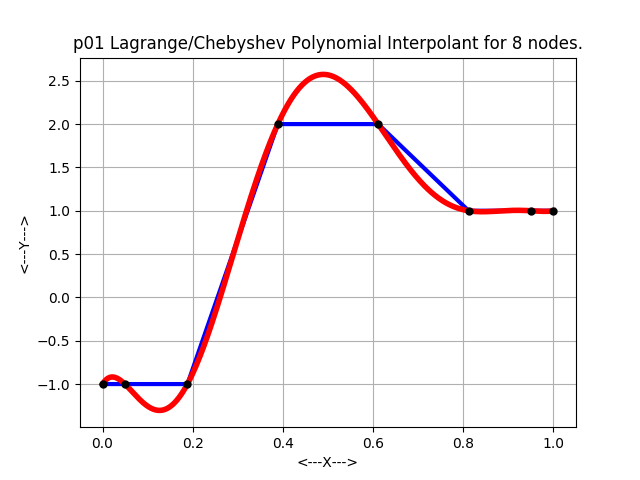
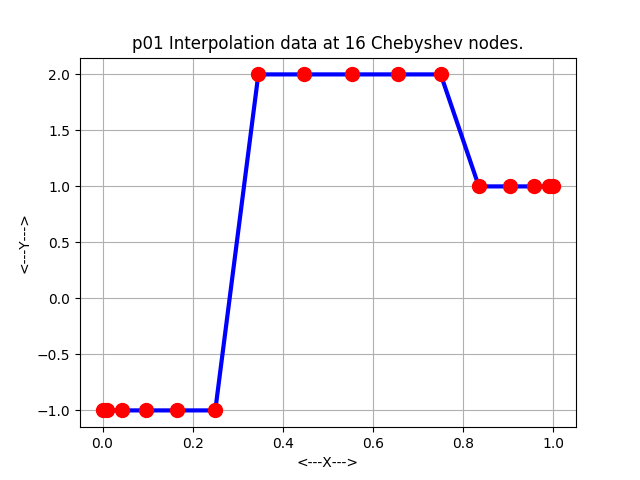
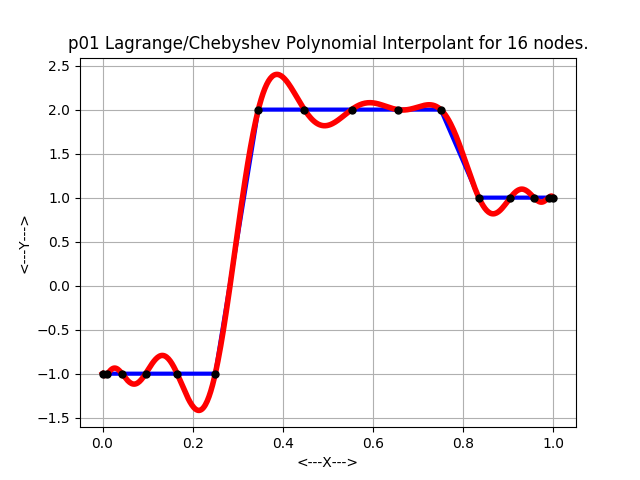
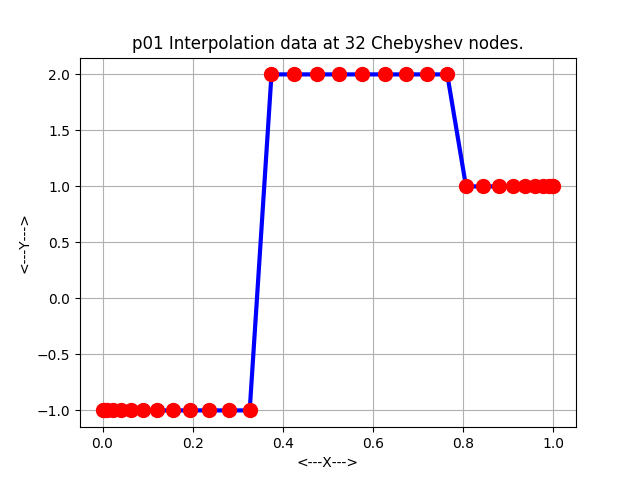
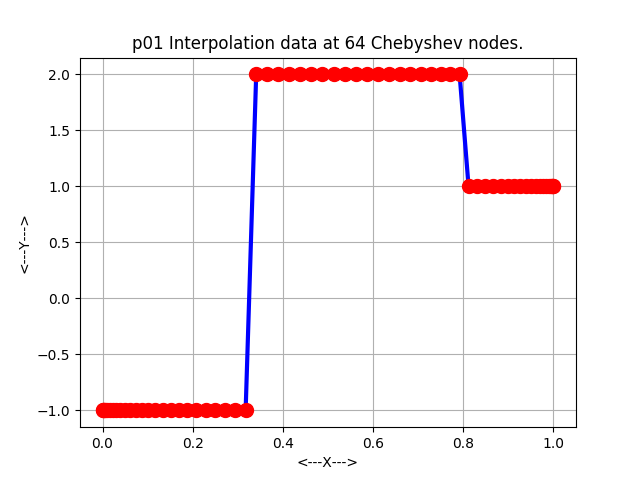
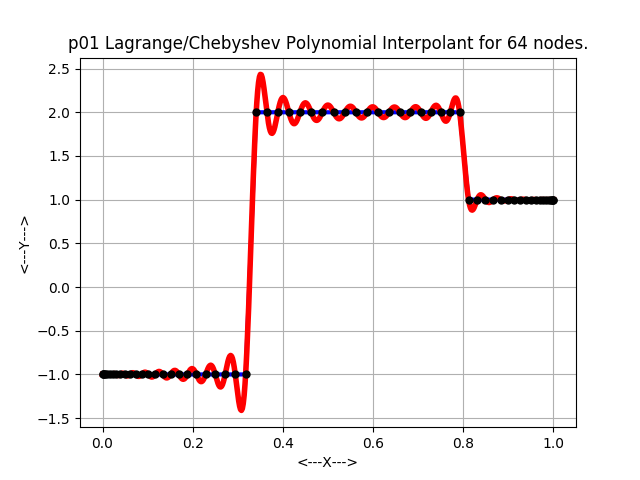
Images for Problem 1:
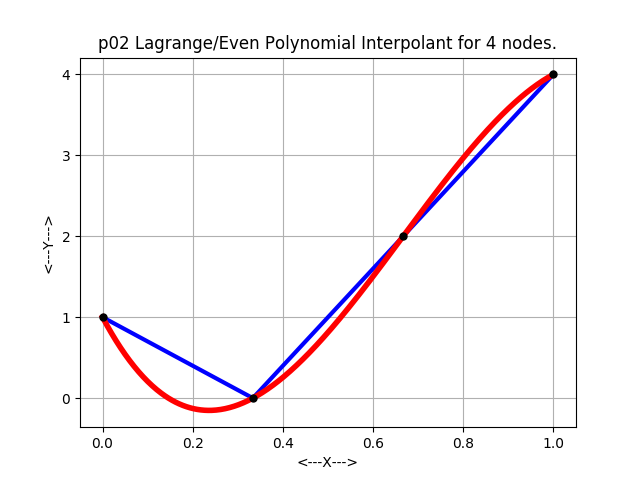
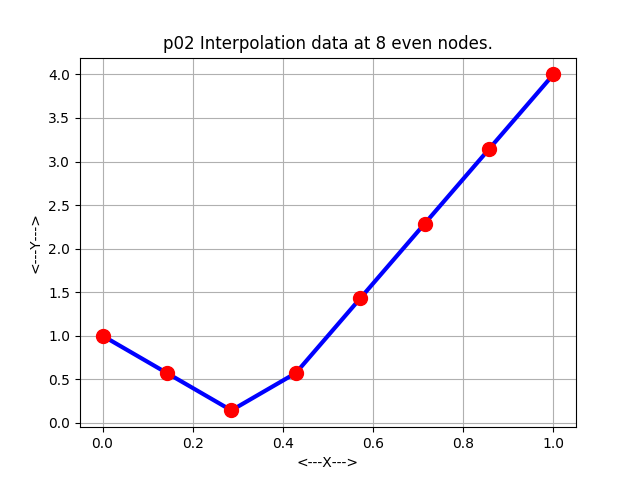
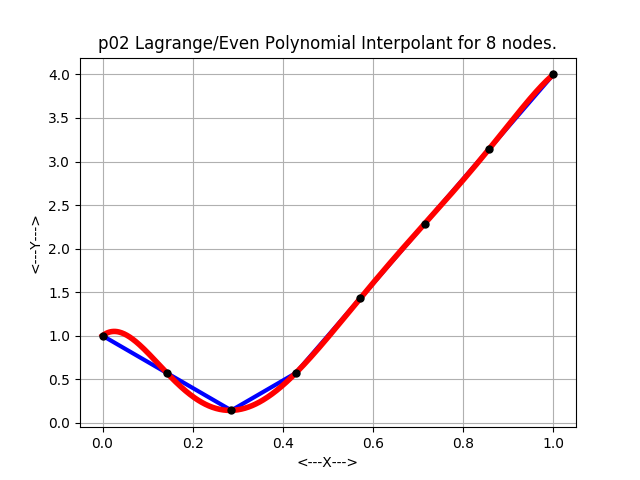
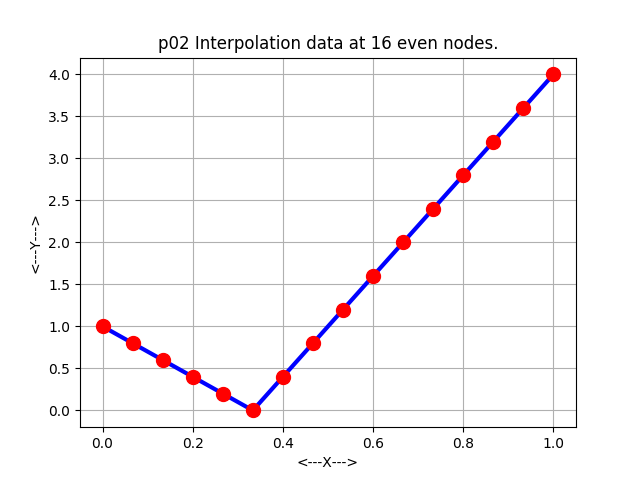
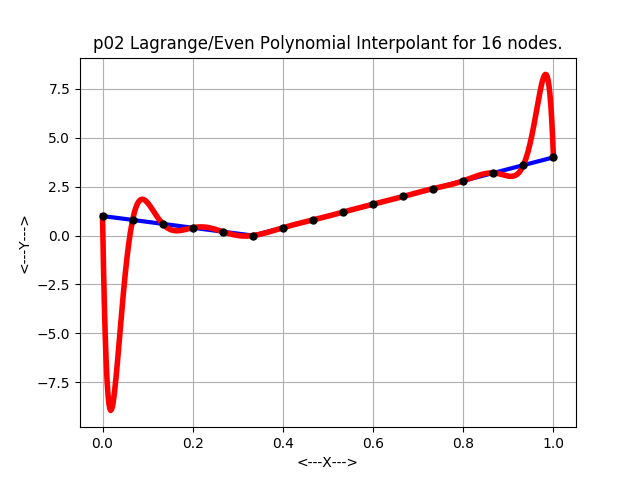
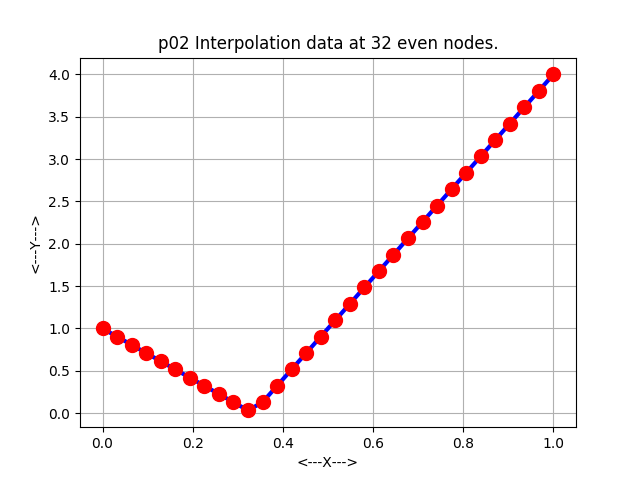
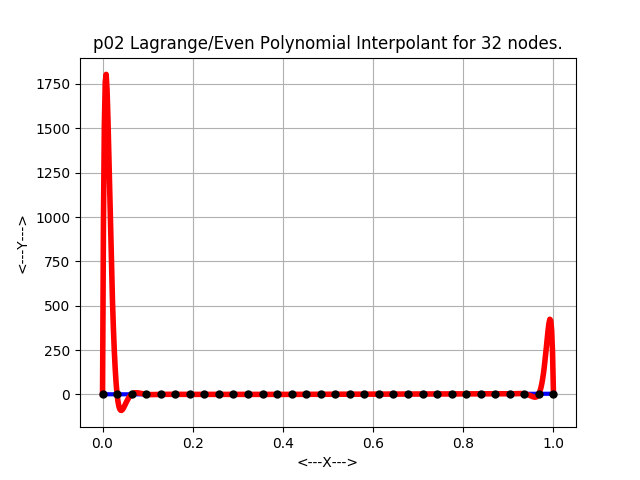
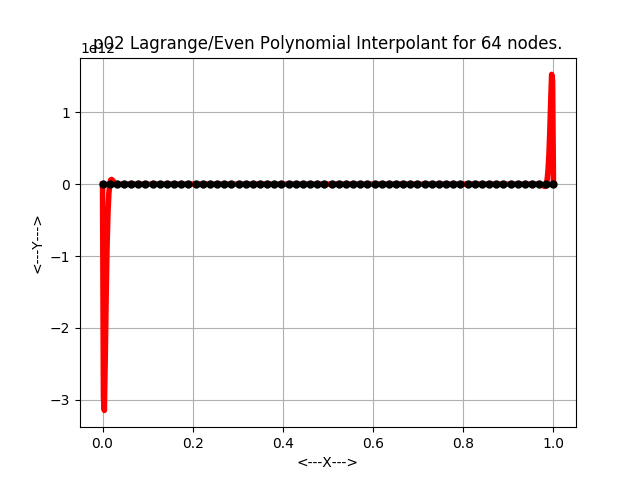
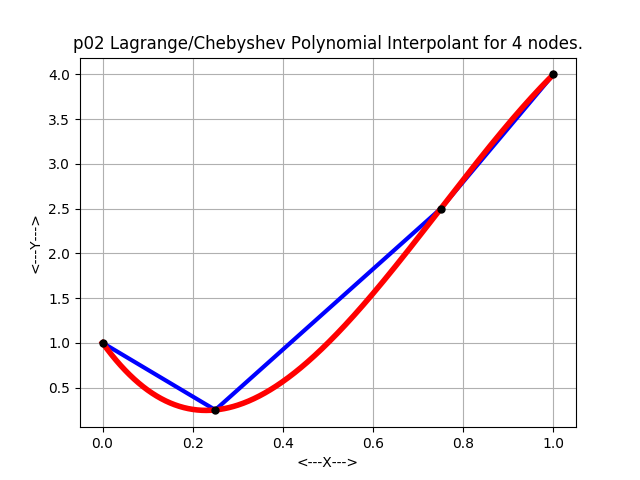
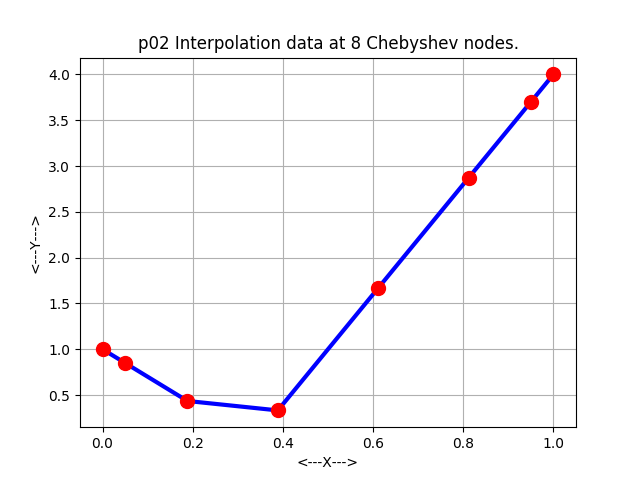
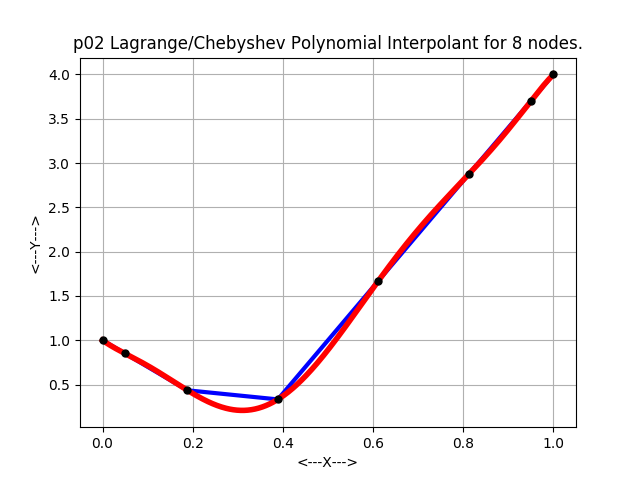
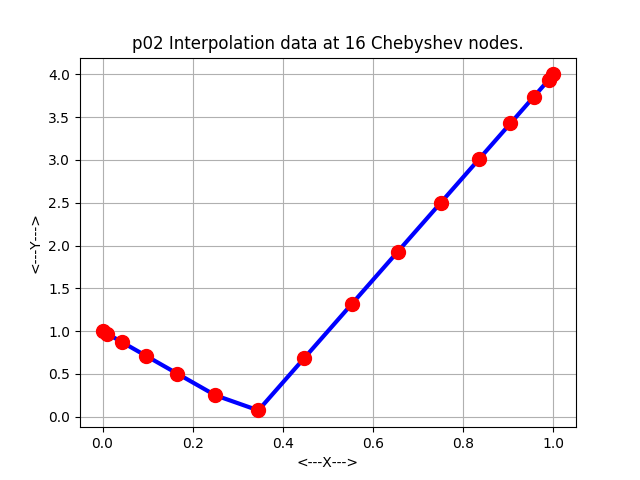
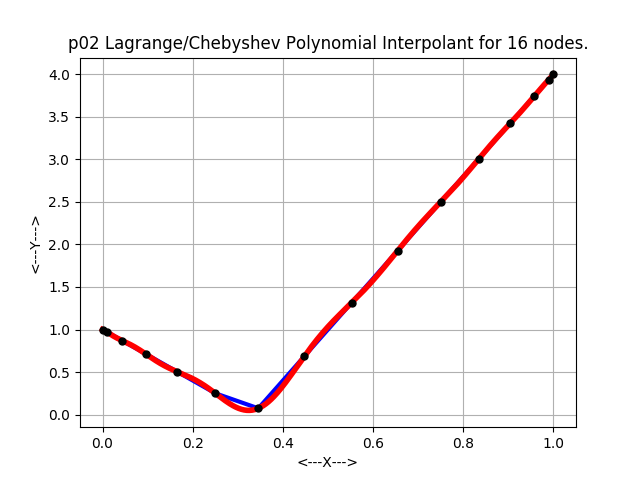
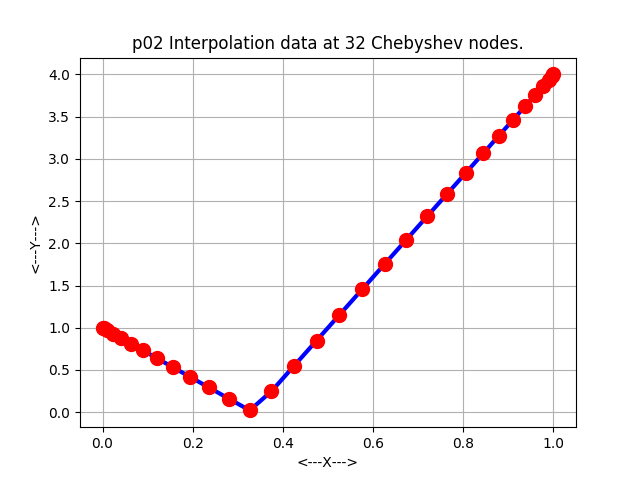
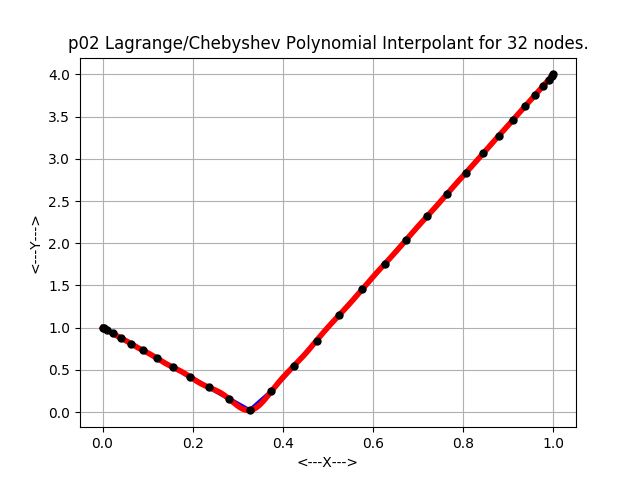
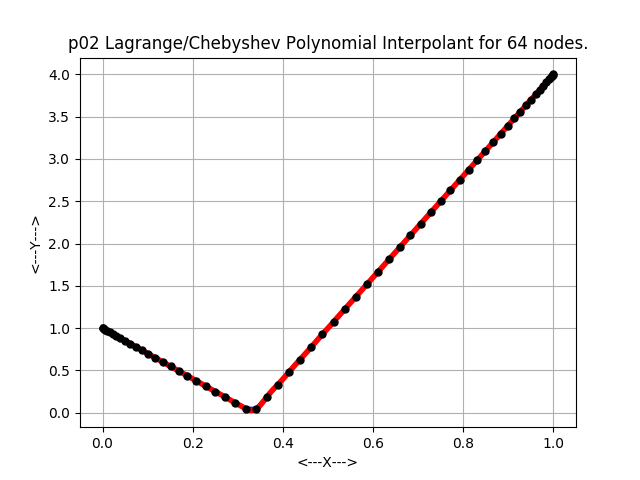
Images for Problem p02:
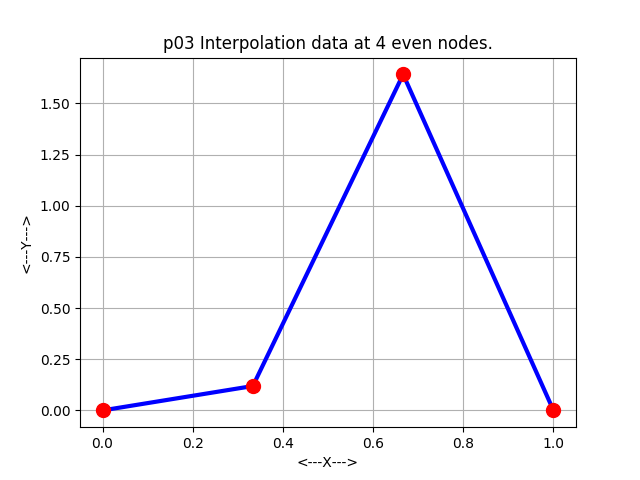
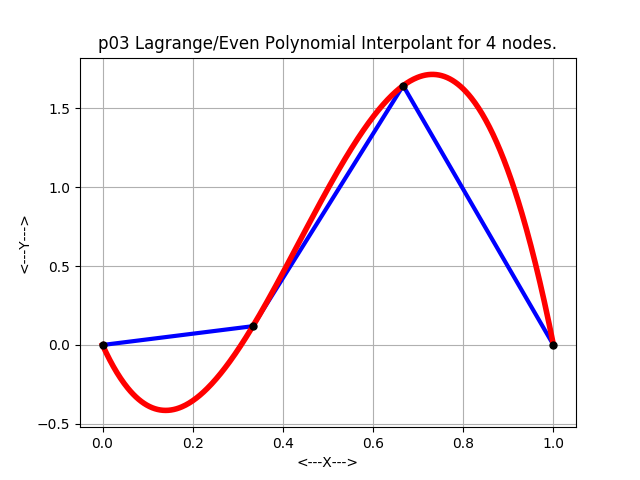
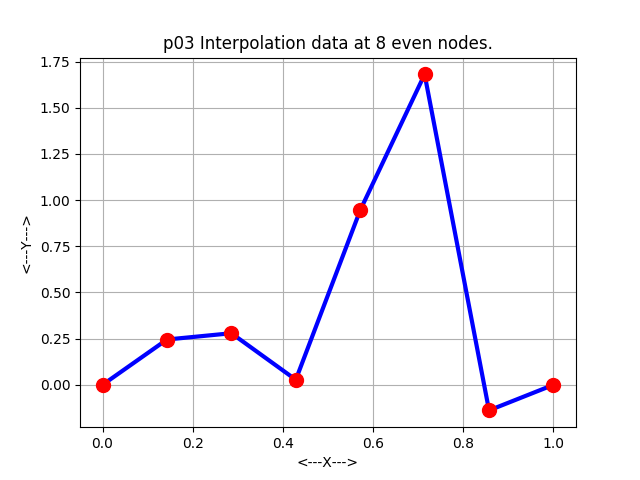
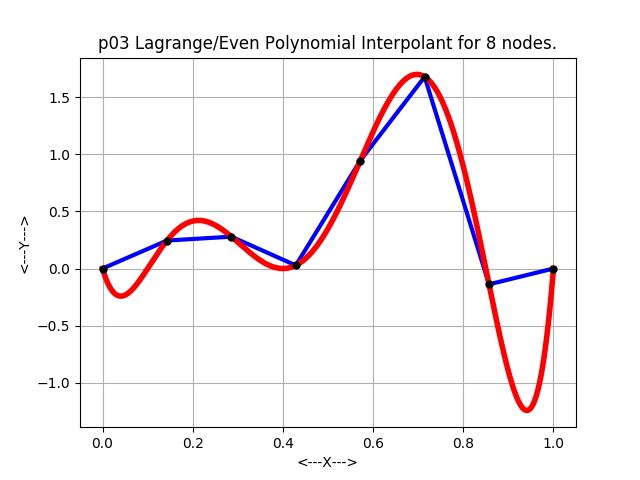
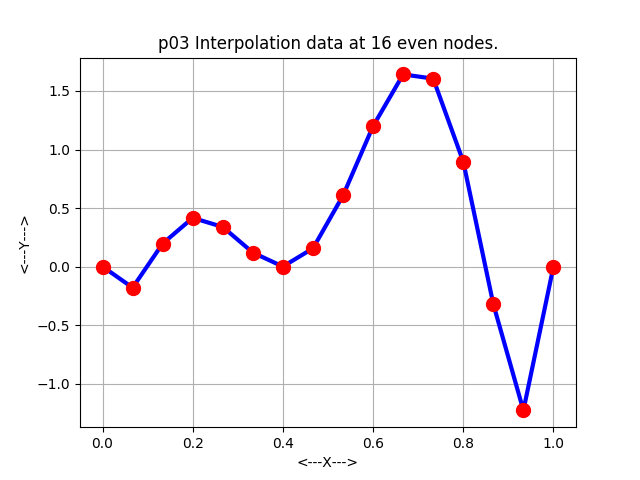
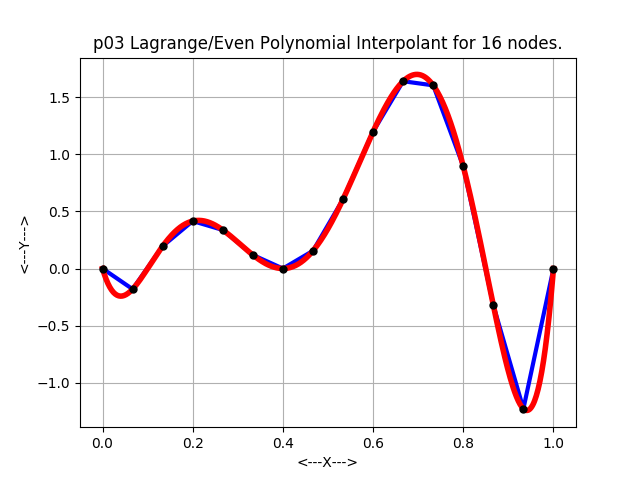
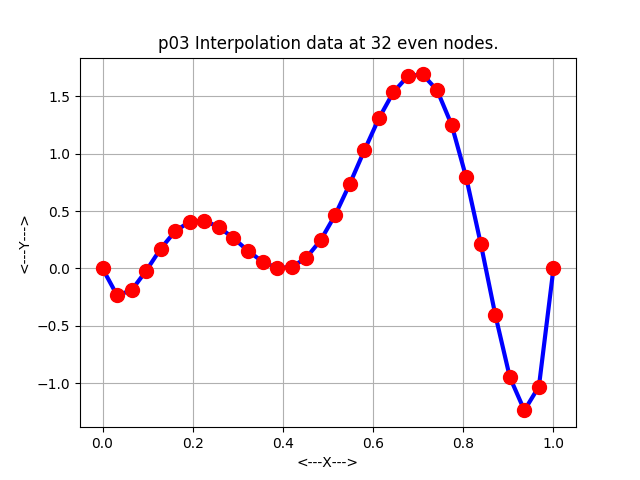
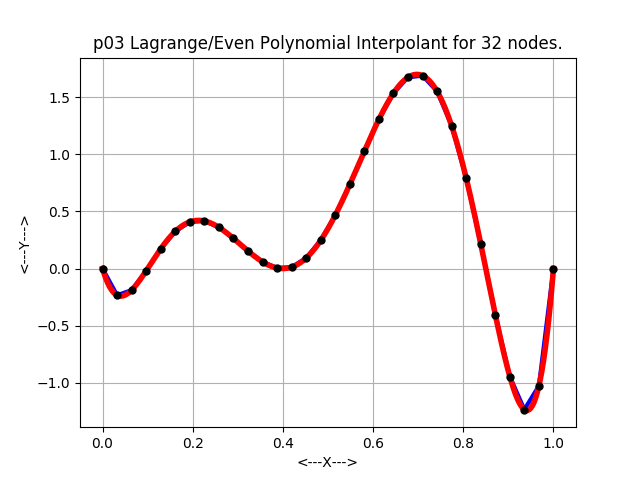
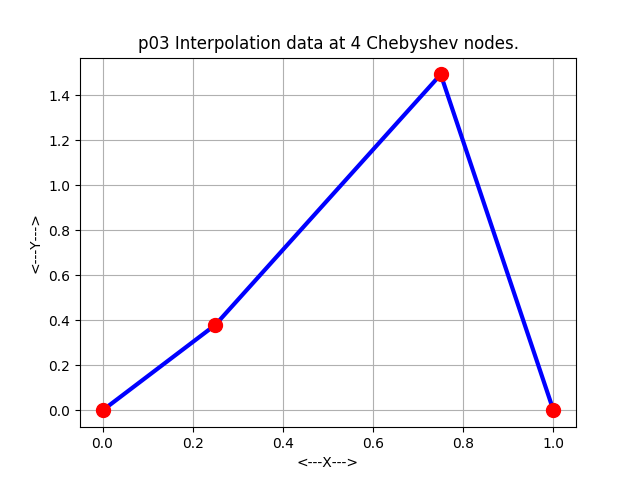
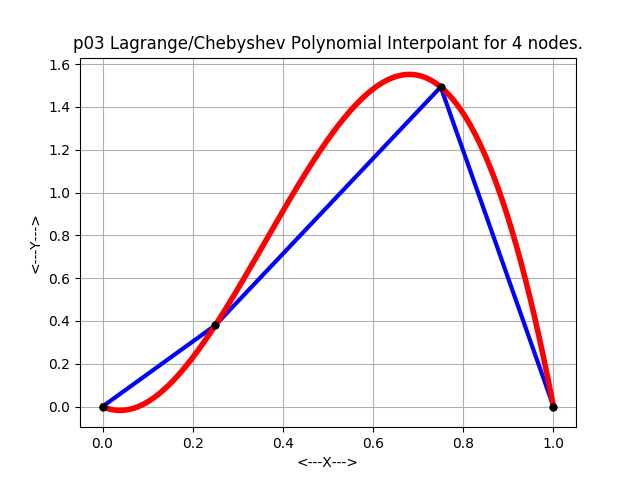
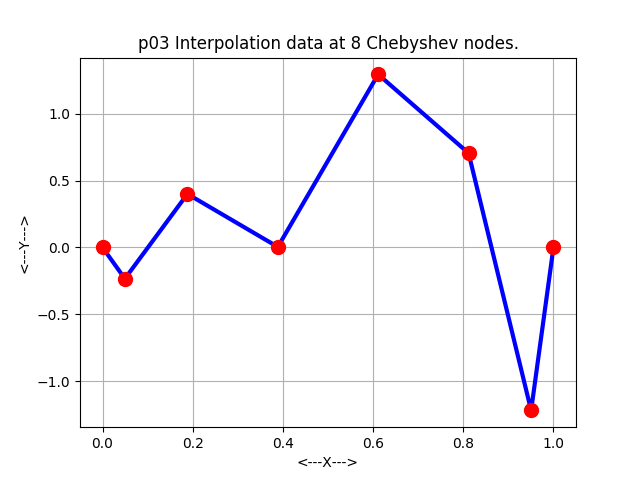
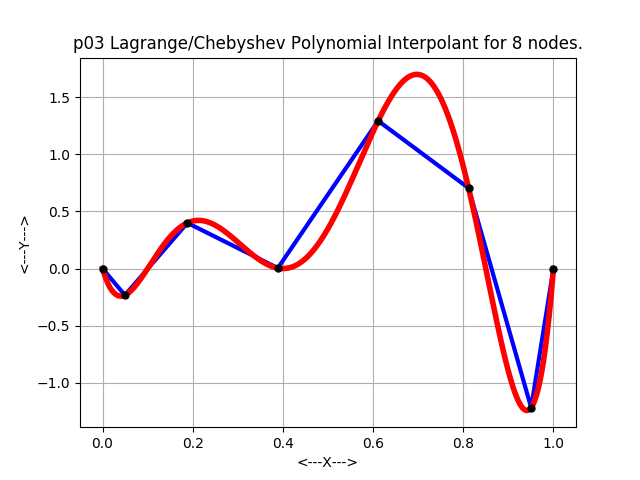
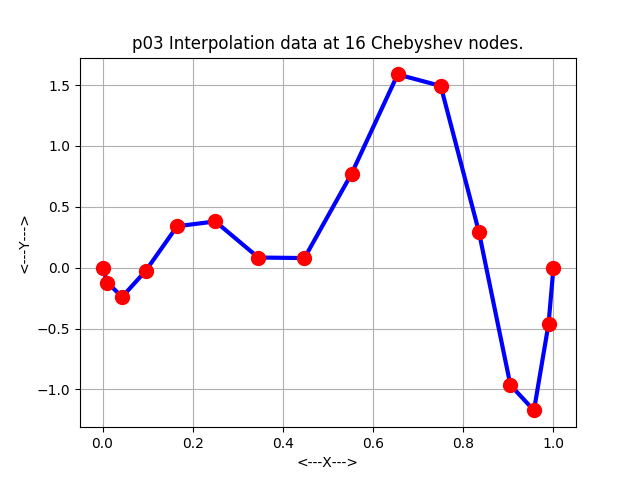
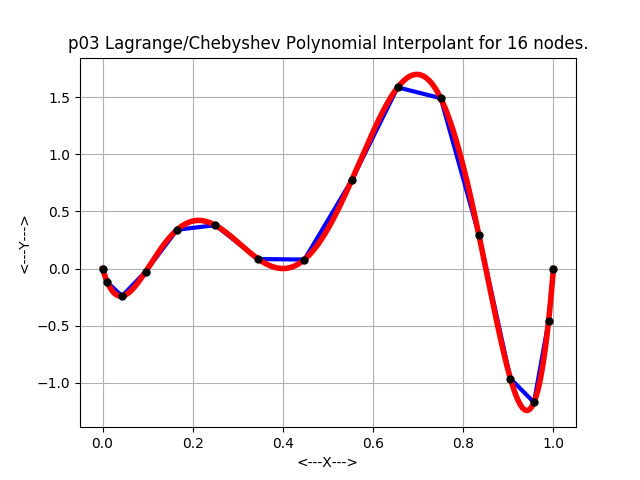
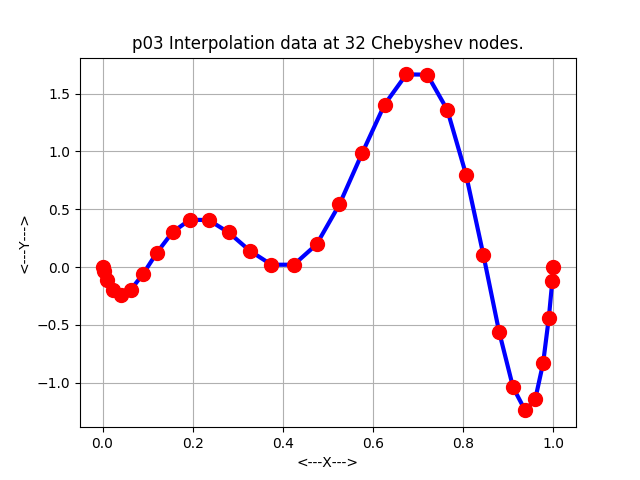
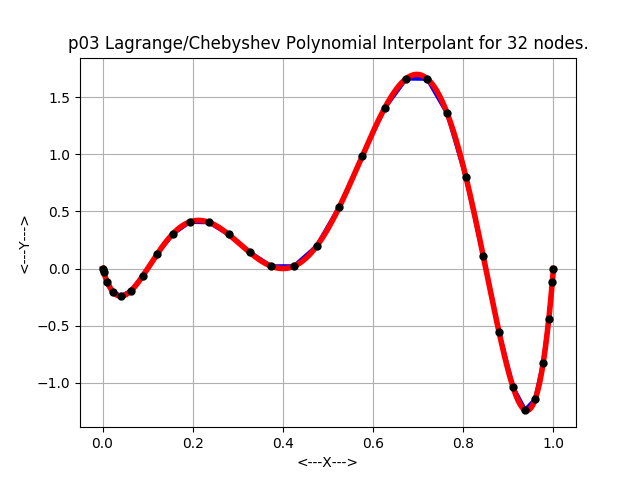
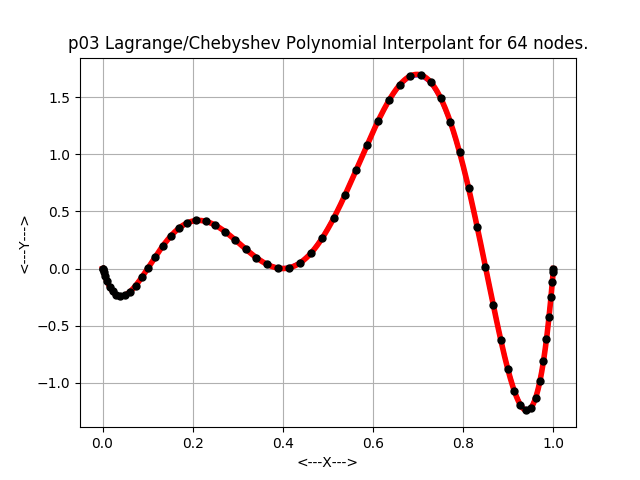
Images for problem p03:
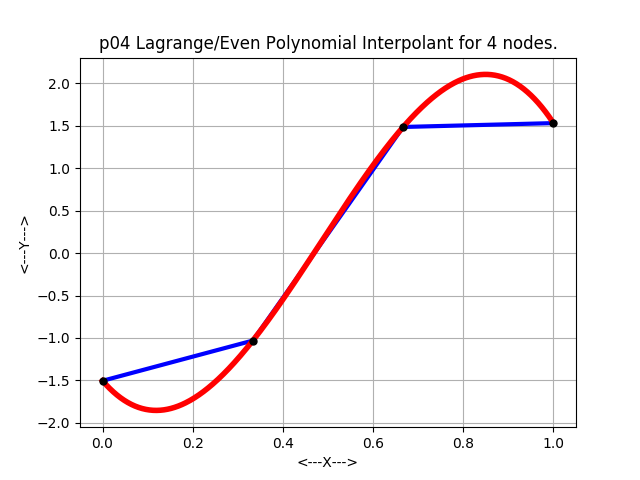
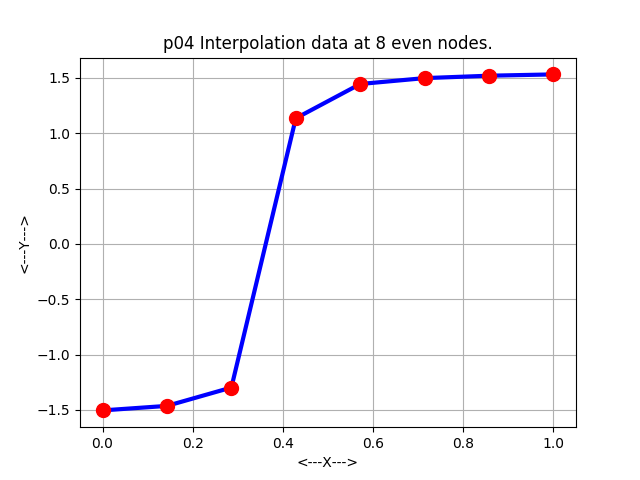
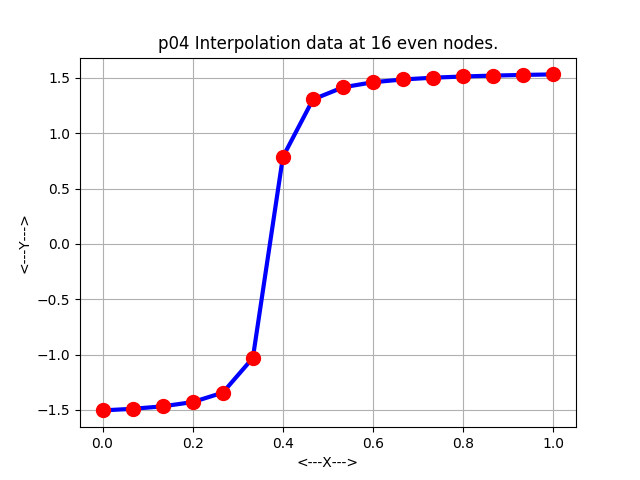
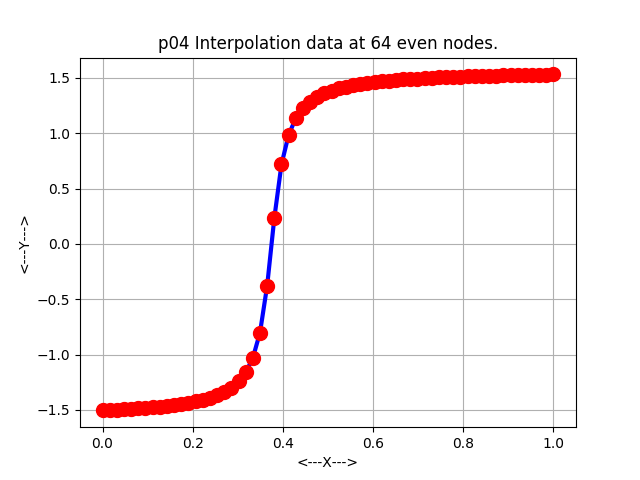
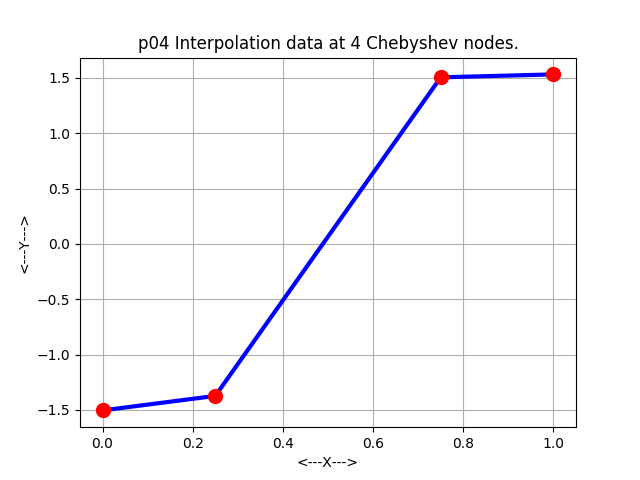
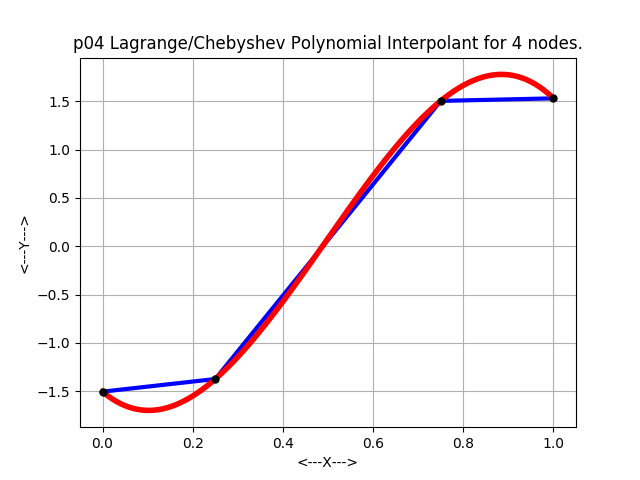
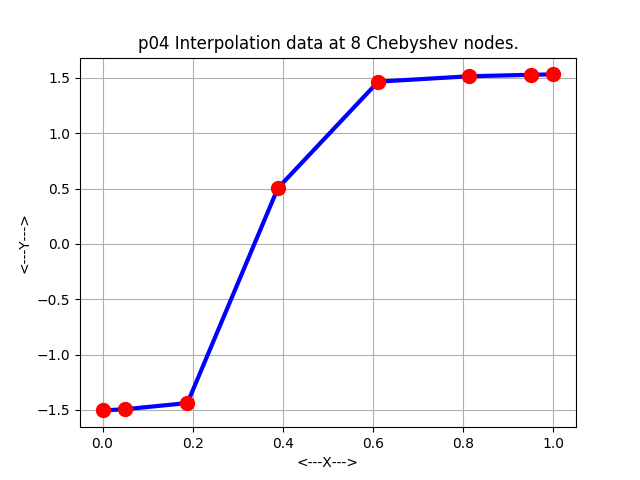
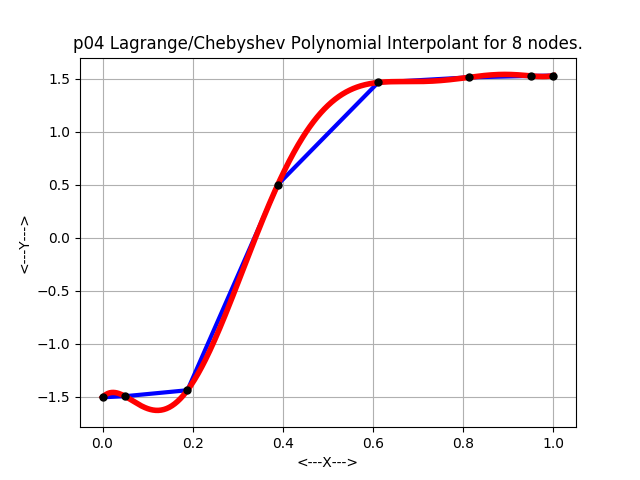
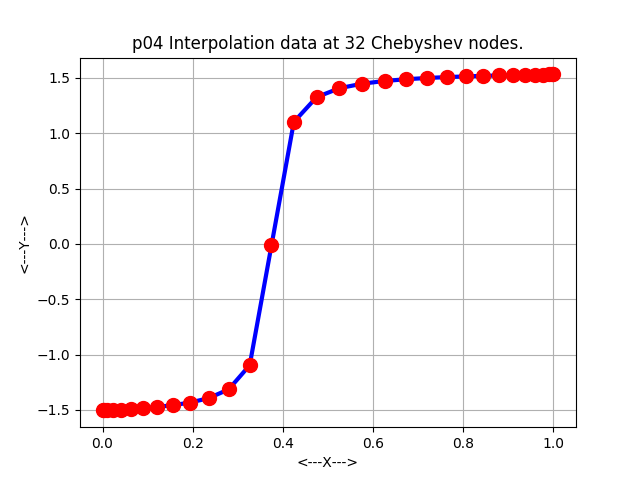
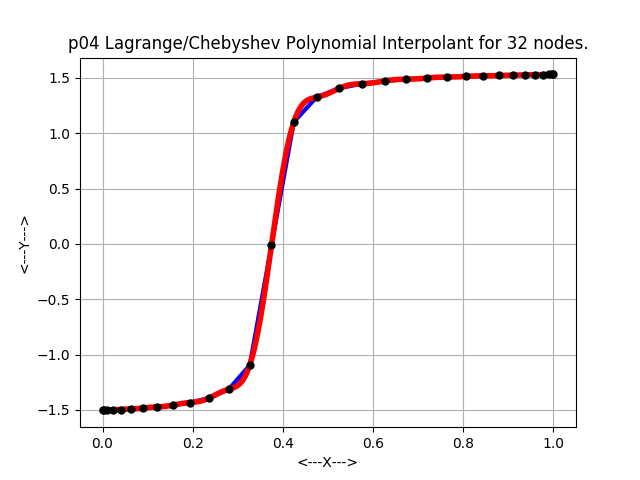
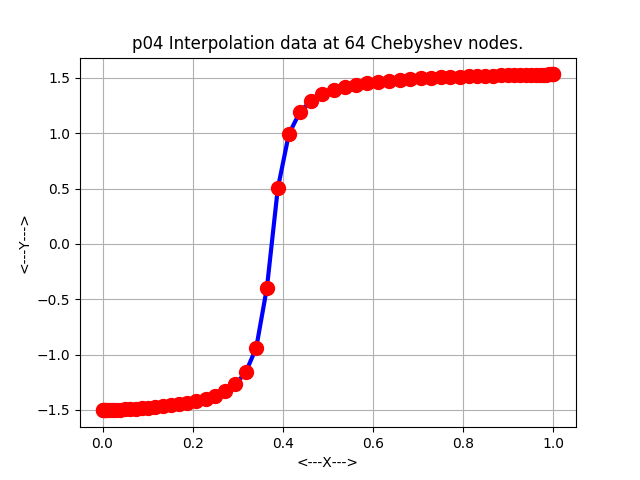
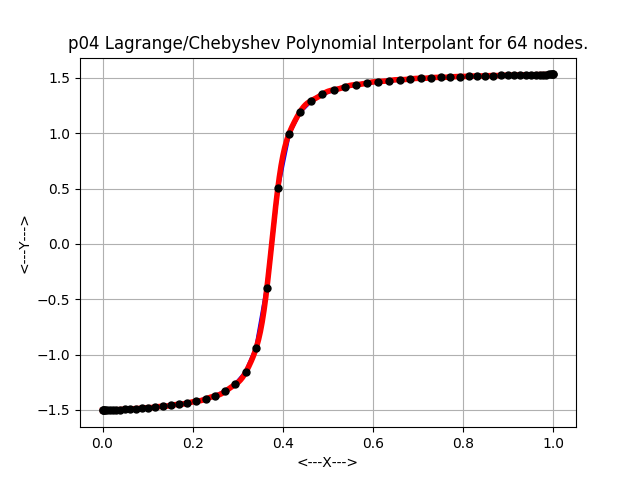
Images for problem p04:
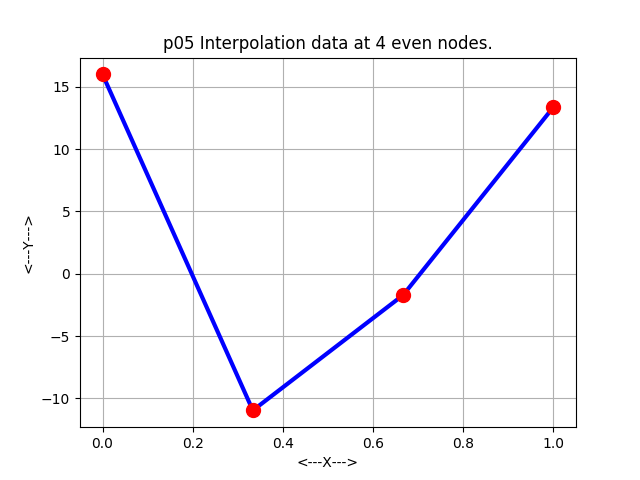
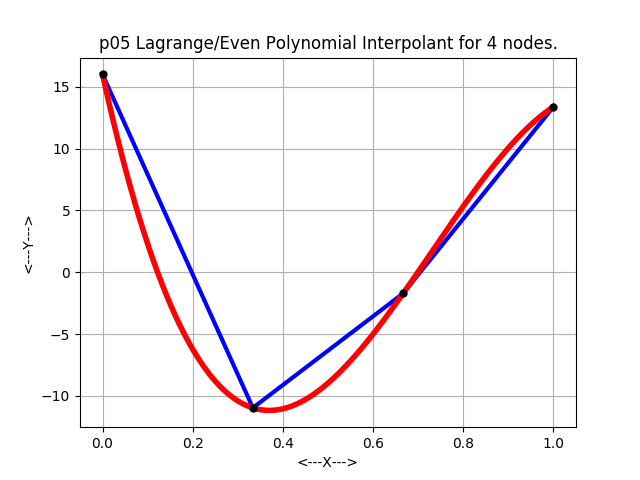
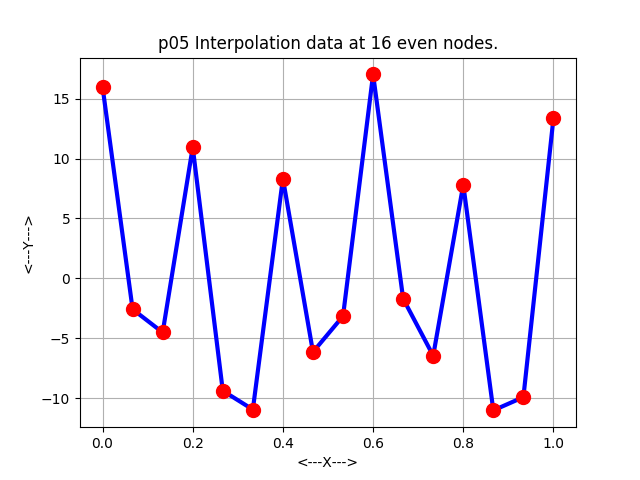
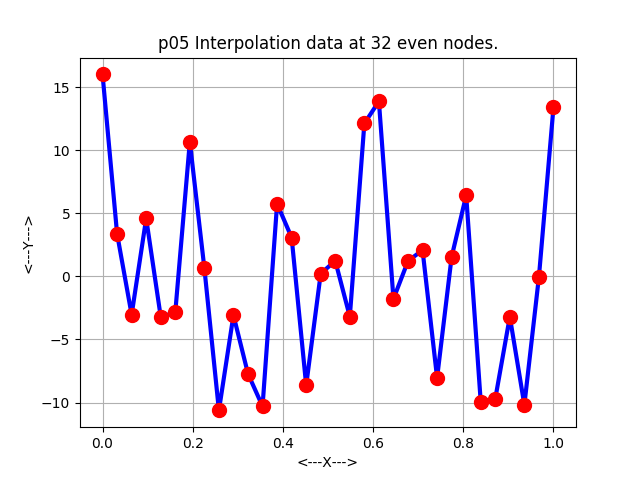
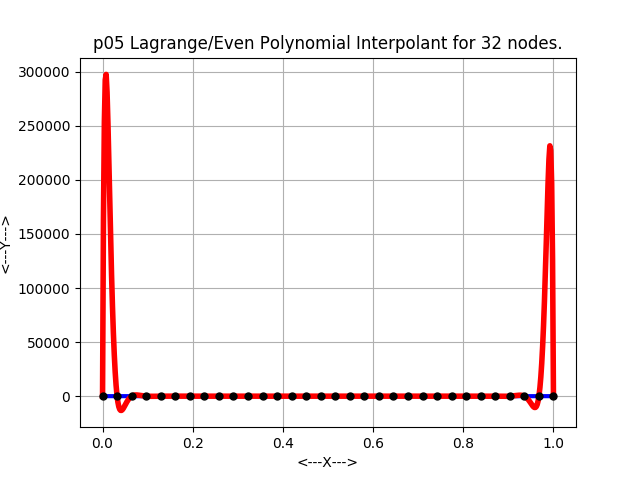
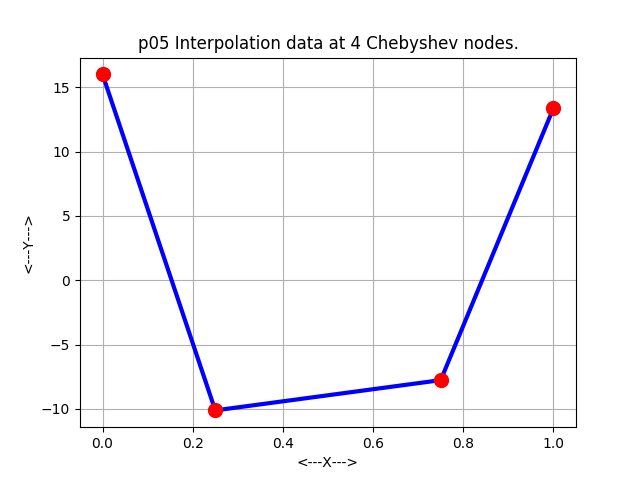
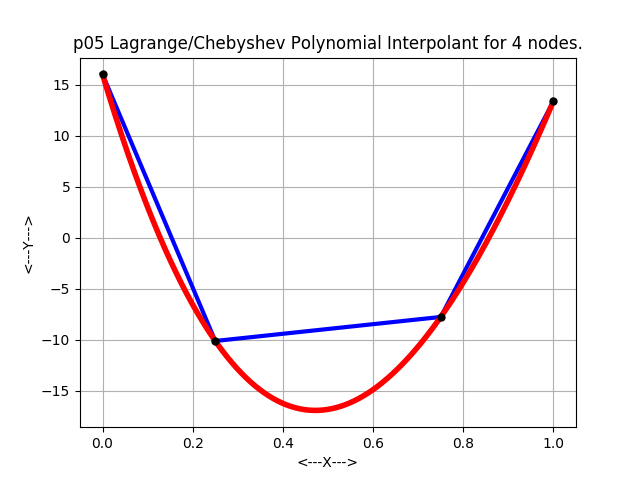
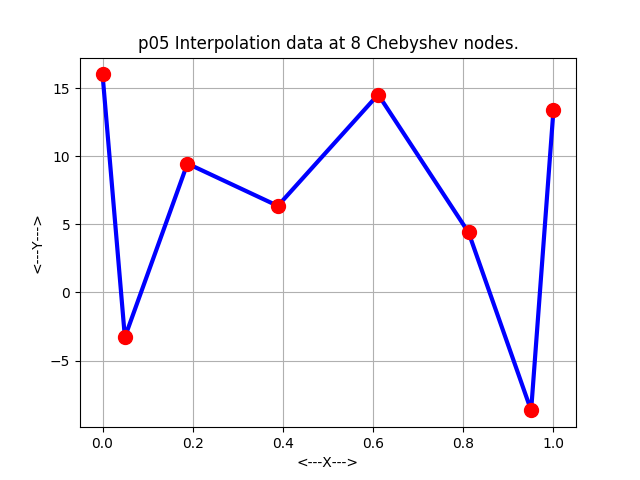
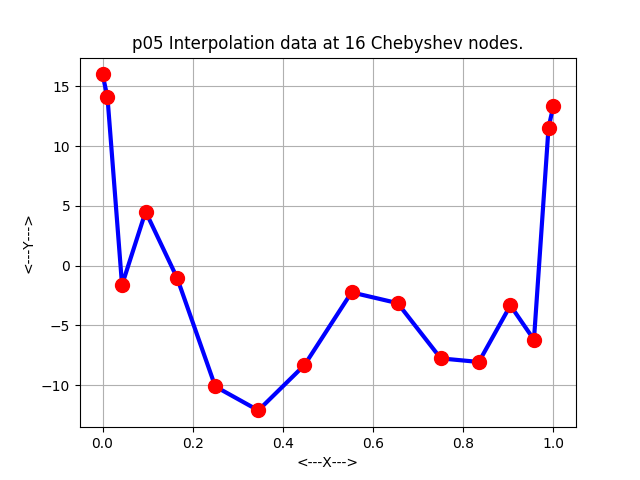
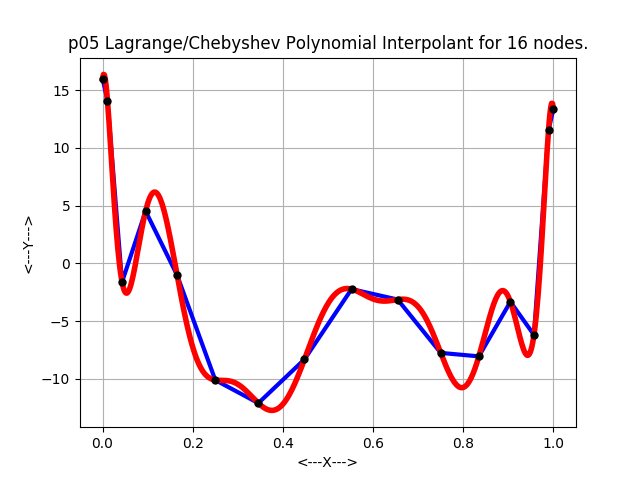
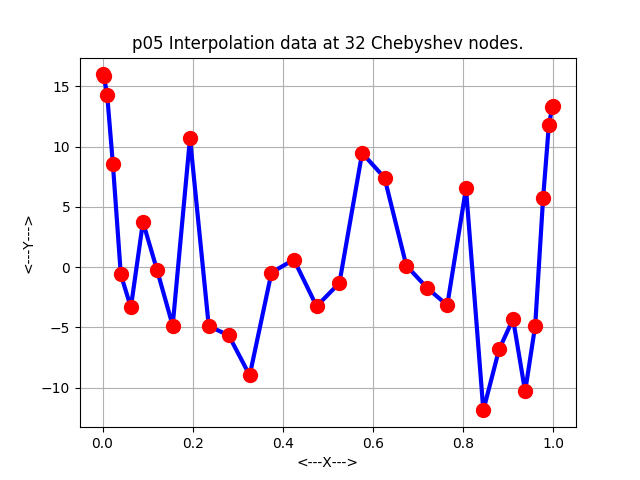
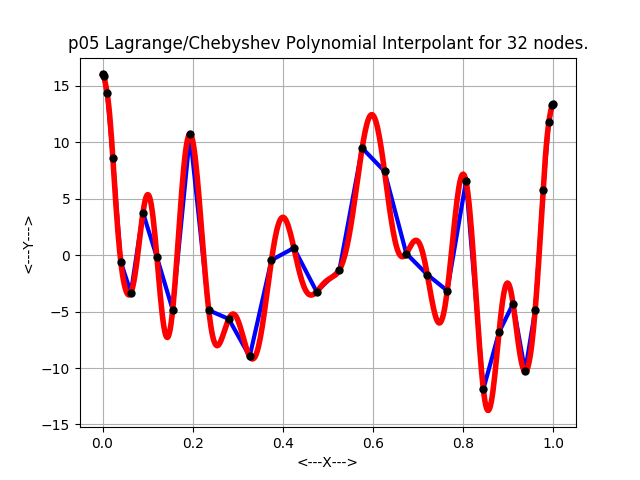
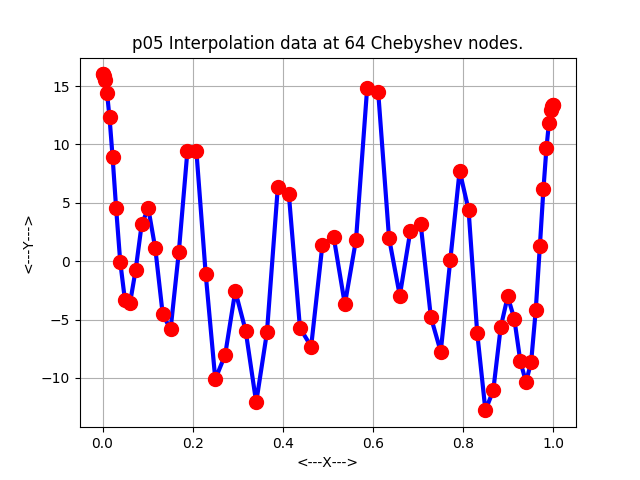
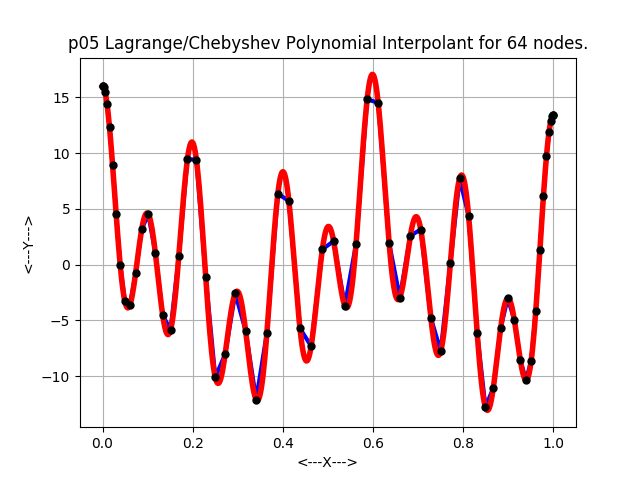
Images for problem p05:
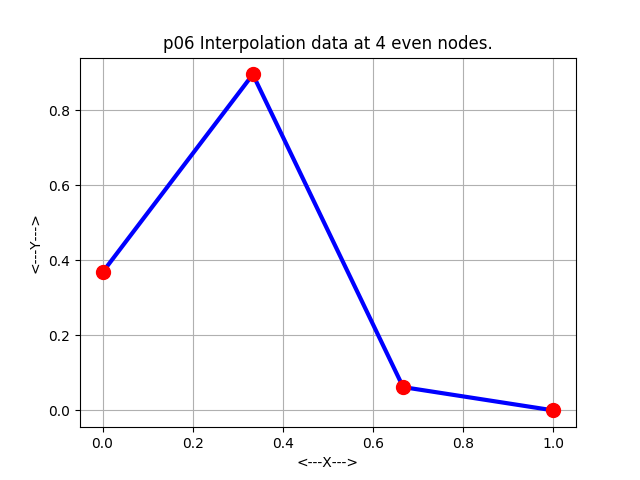
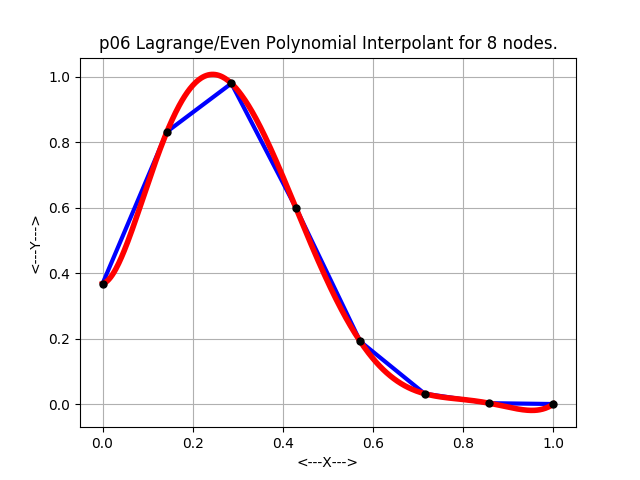
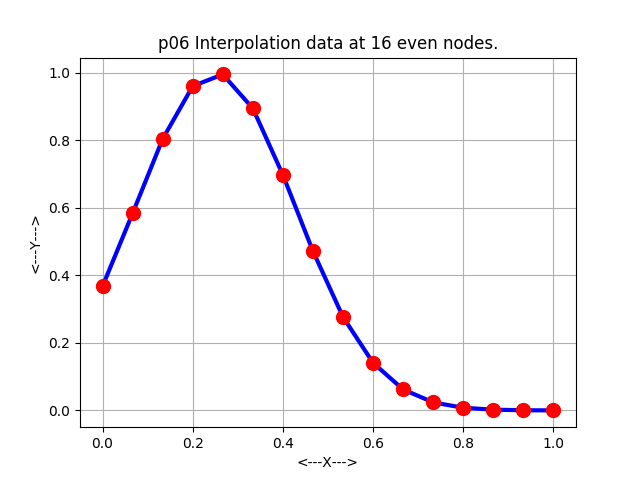
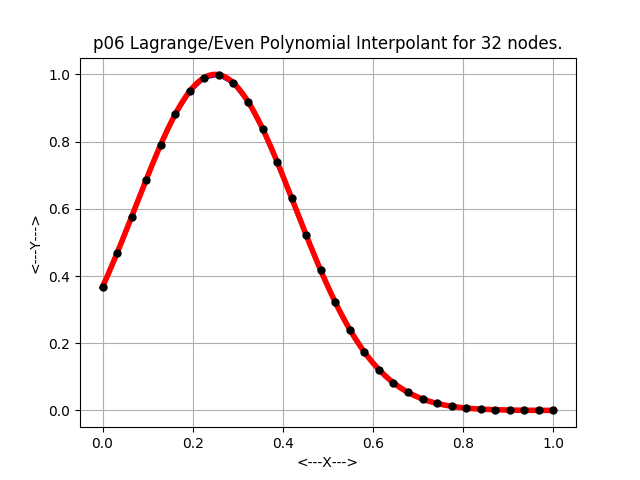
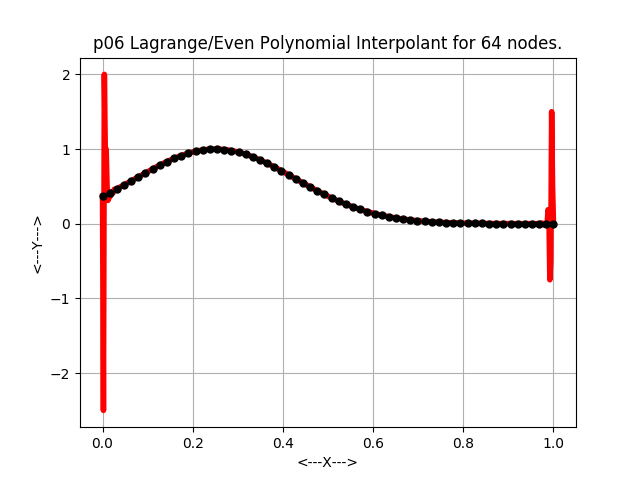
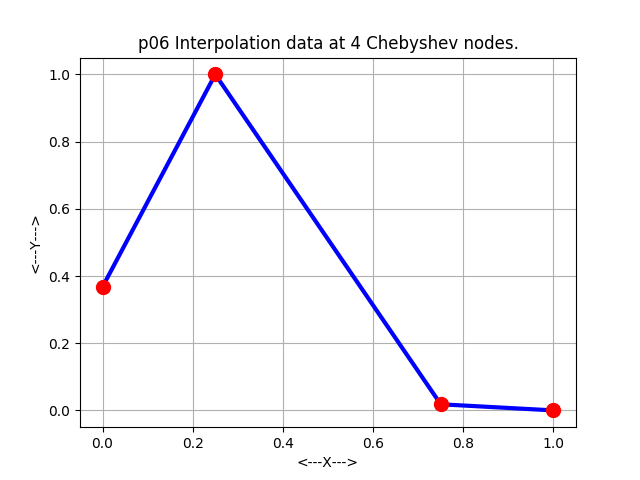
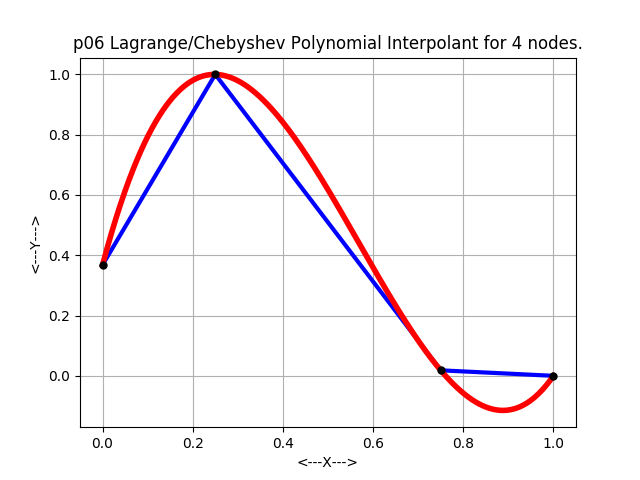
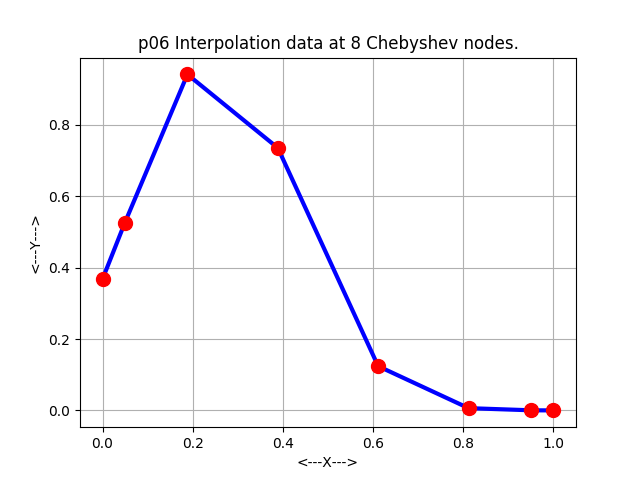
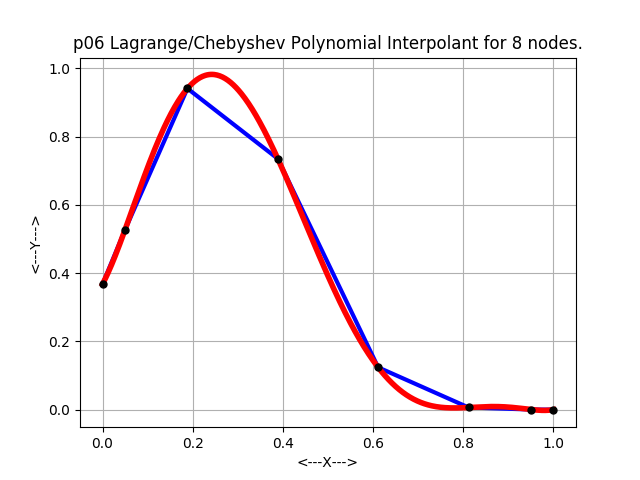
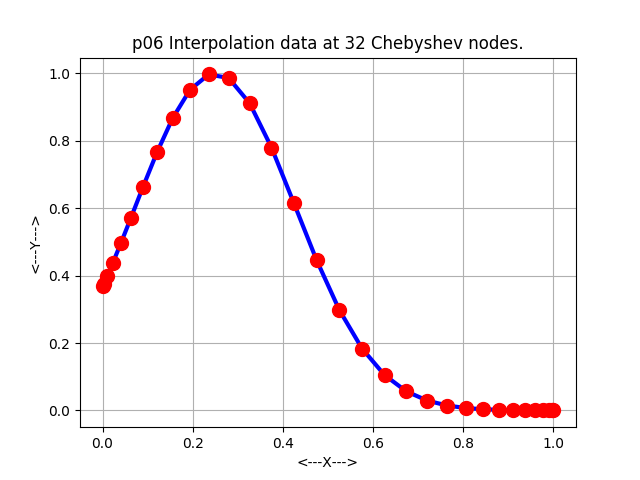
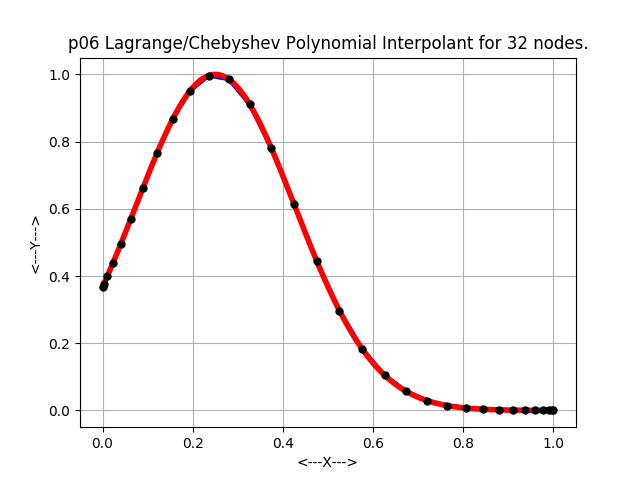
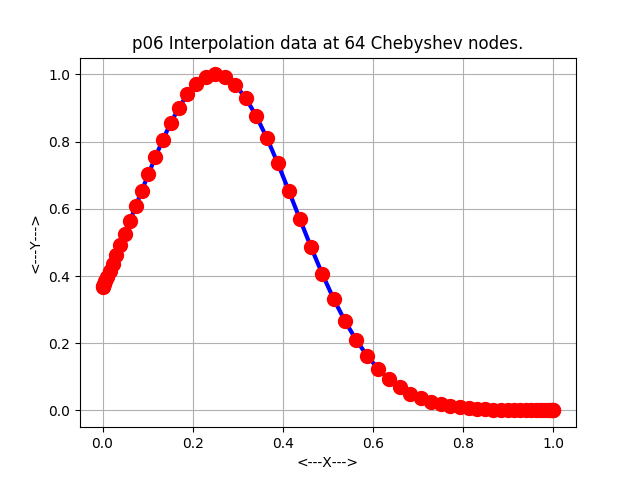
Images for problem p06:
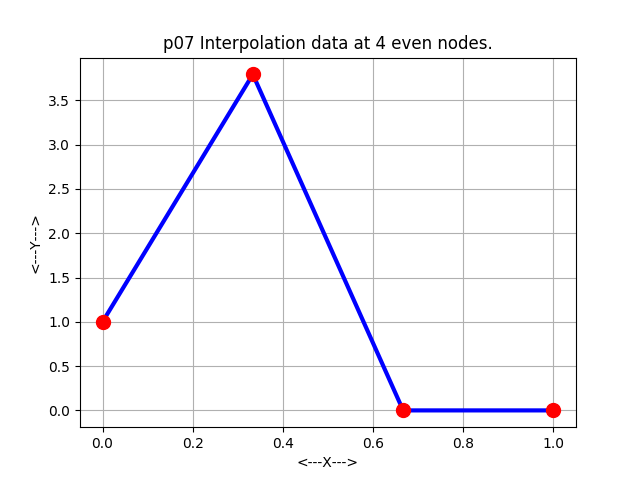
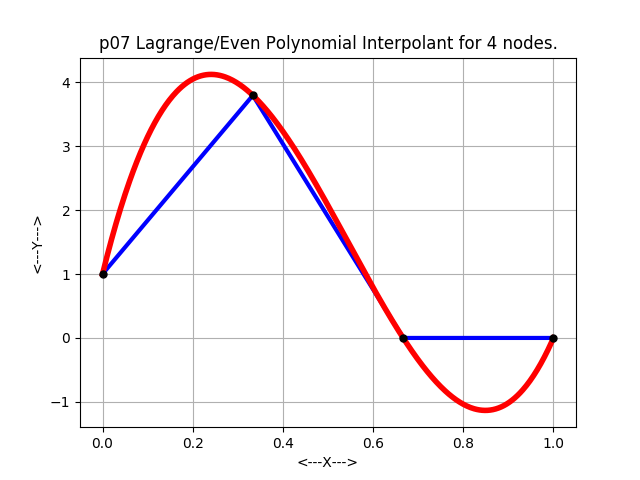
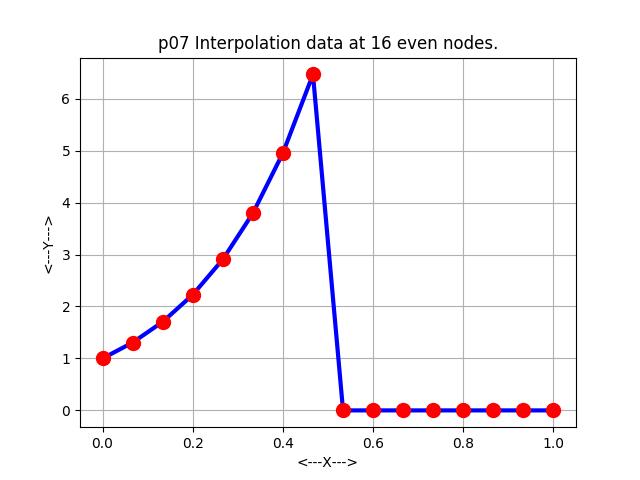
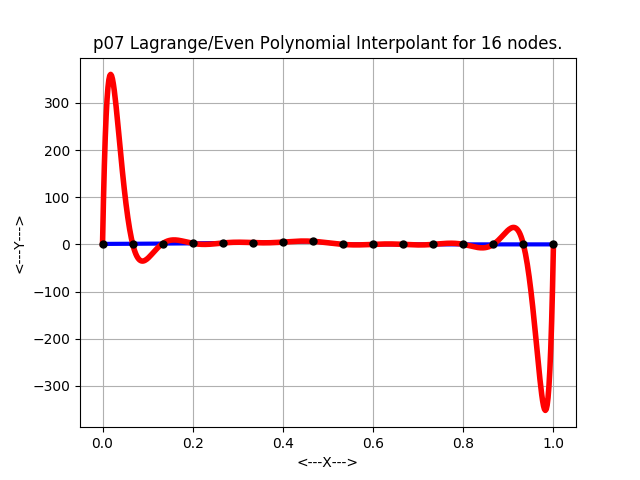
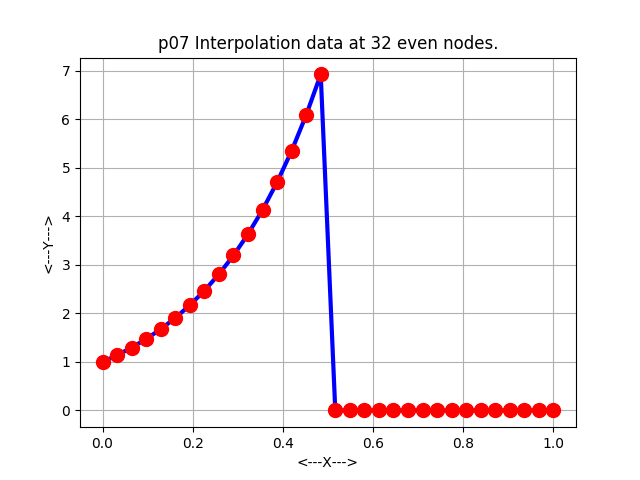
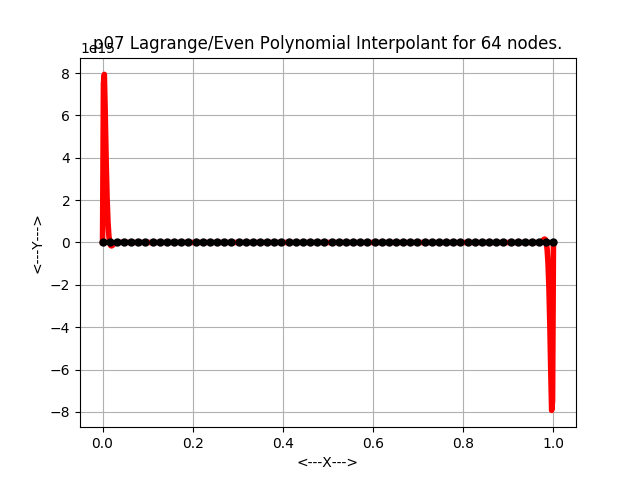
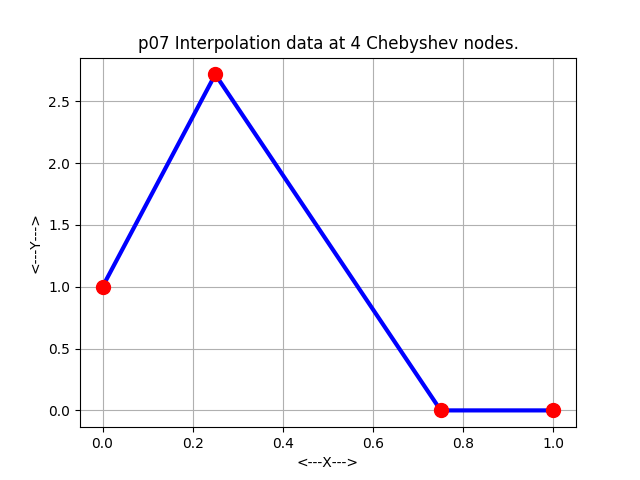
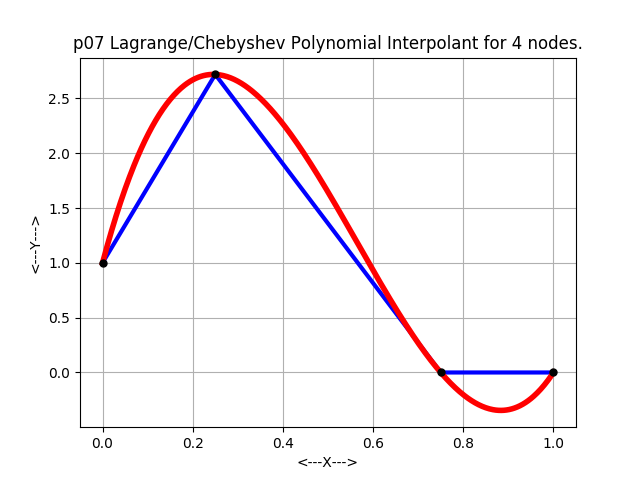
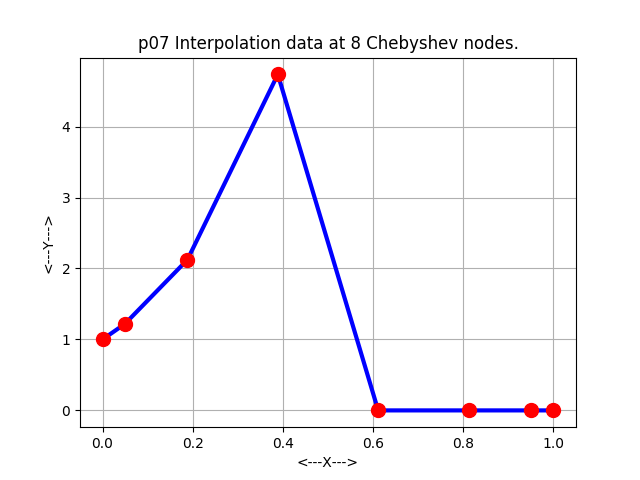
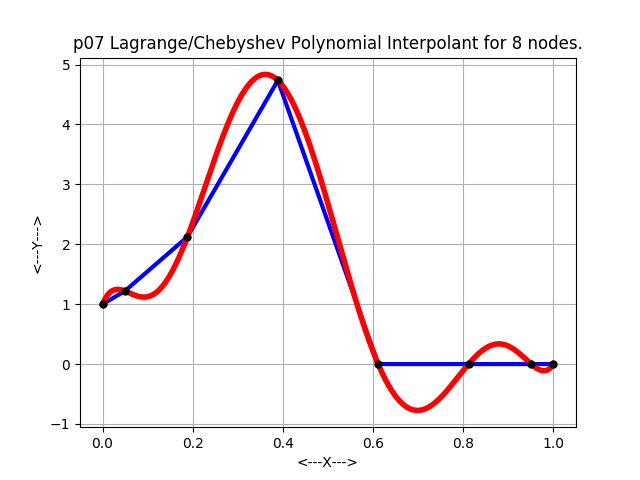
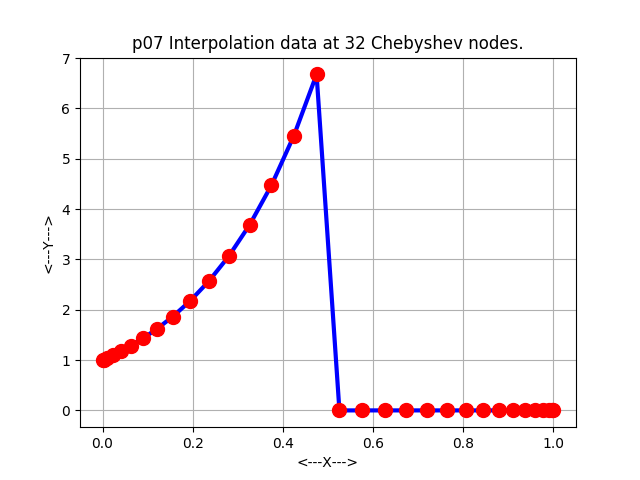
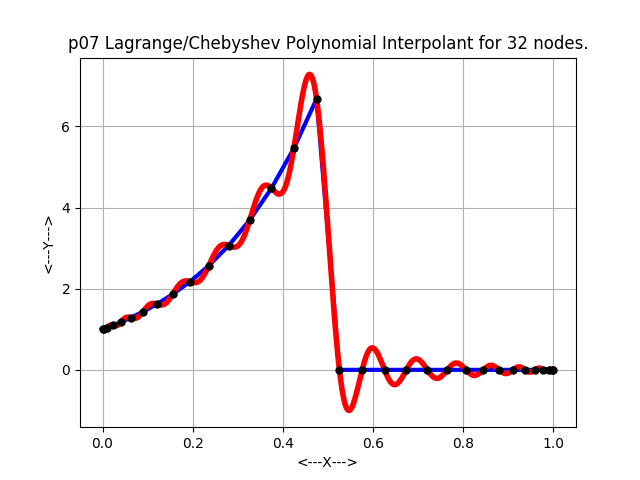
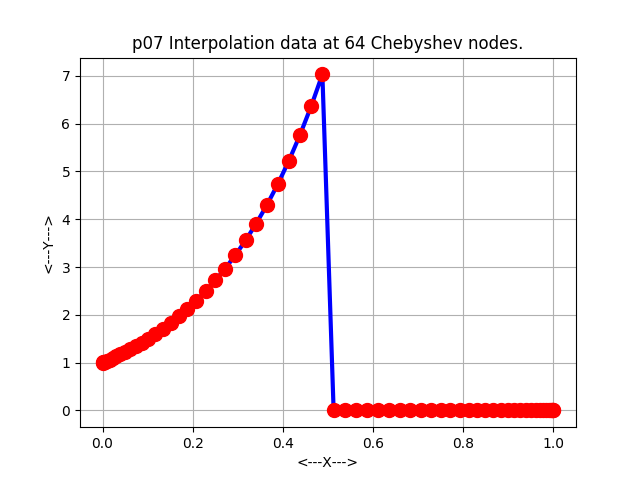
Images for problem p07:
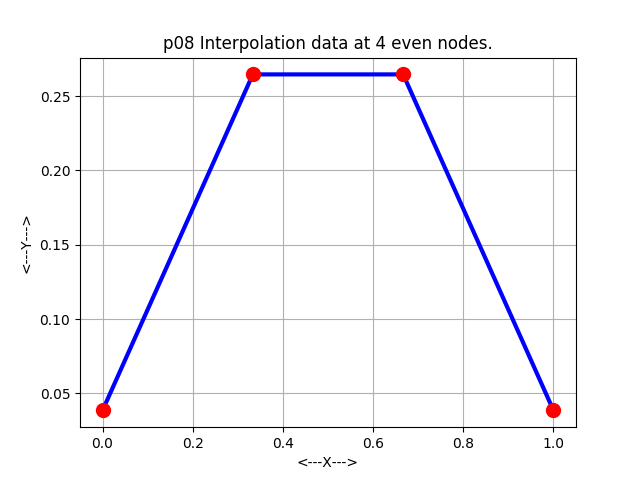
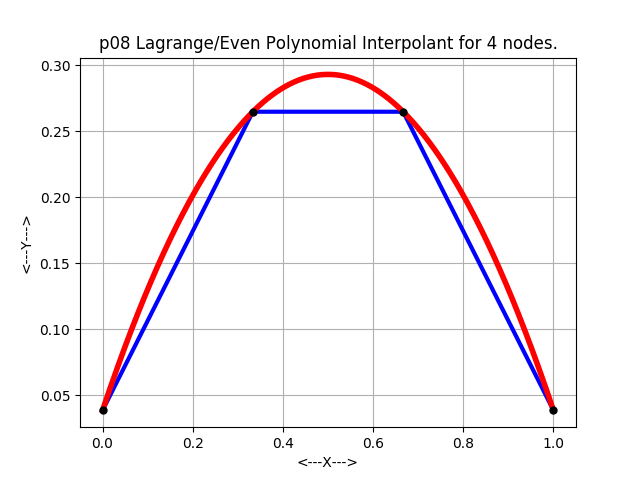
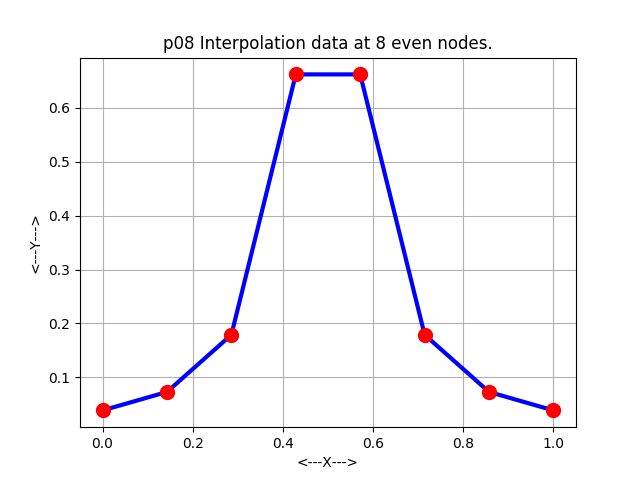
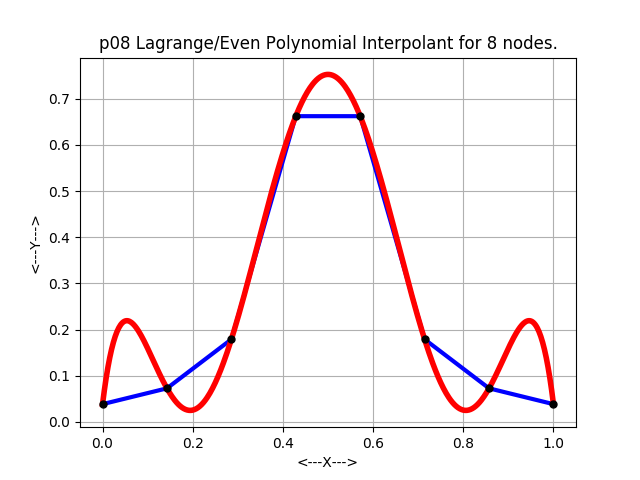
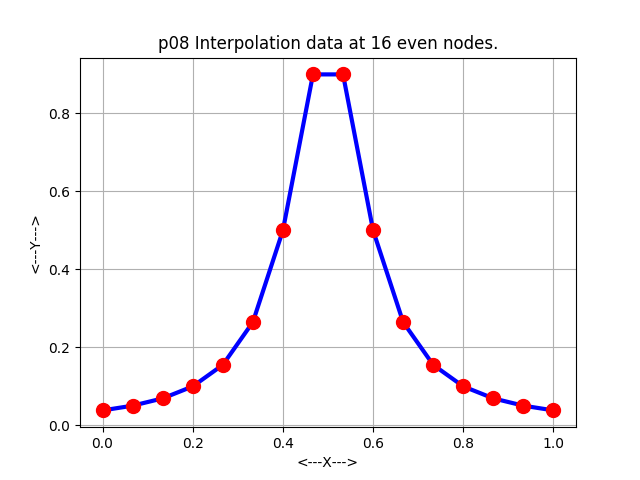
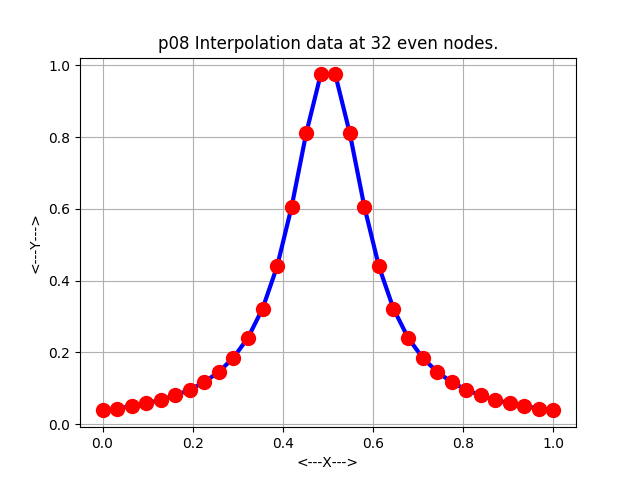
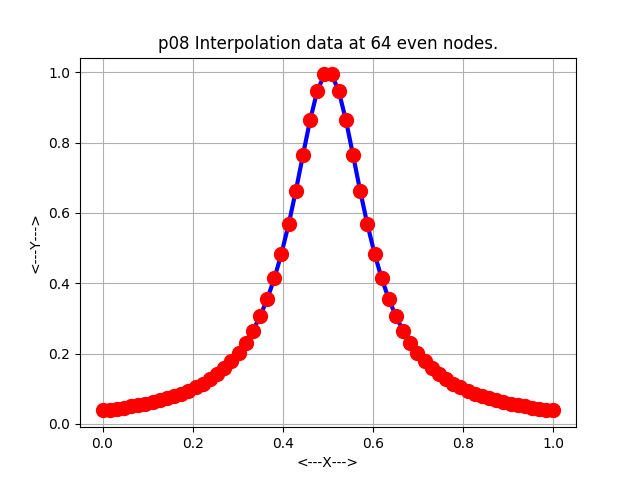
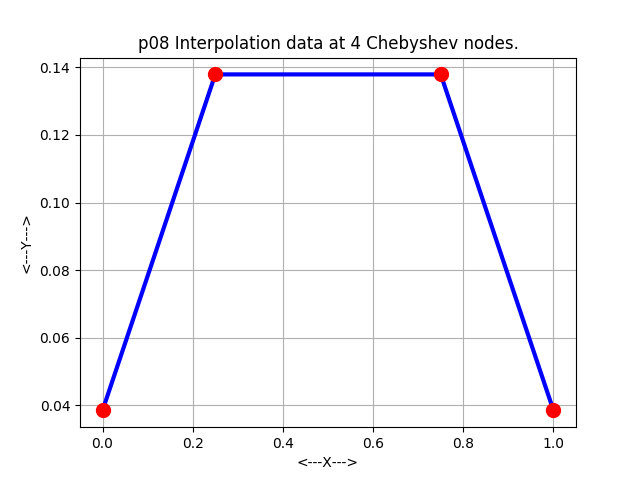
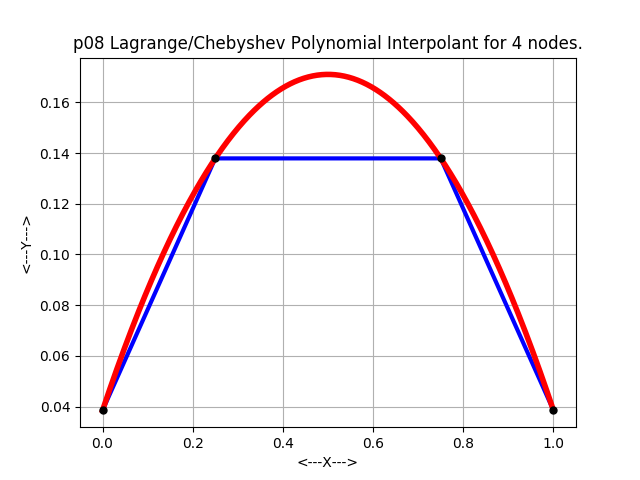
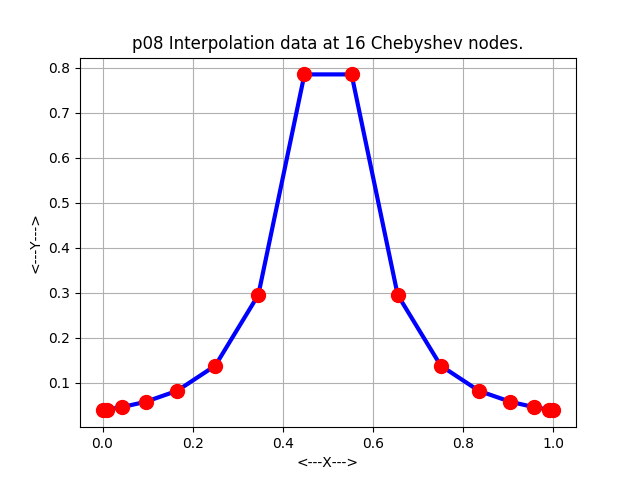
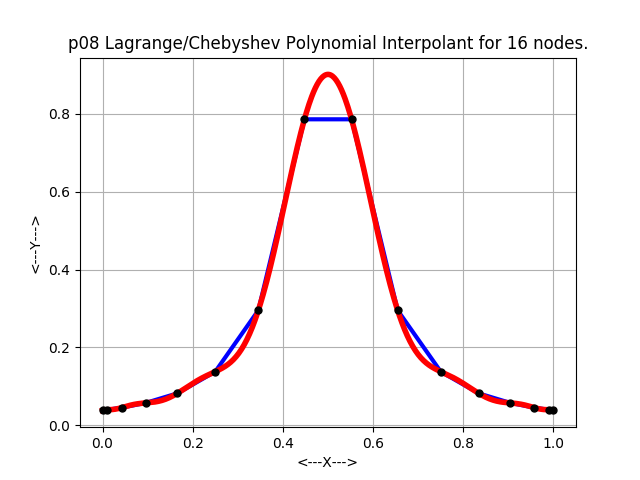
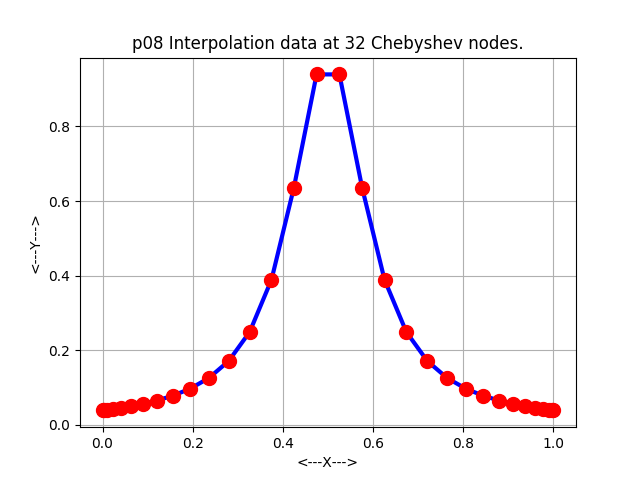
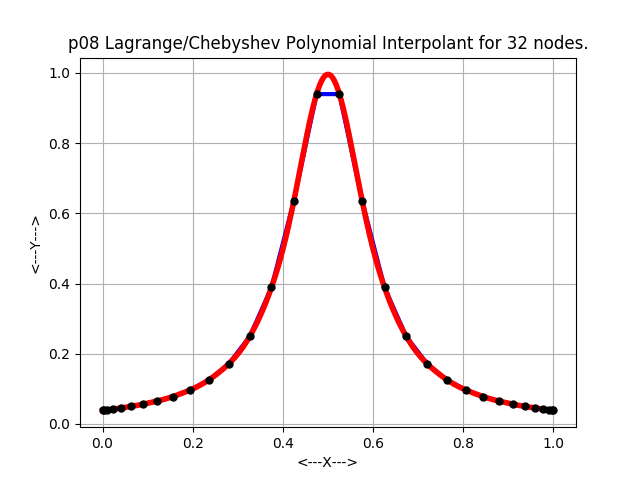
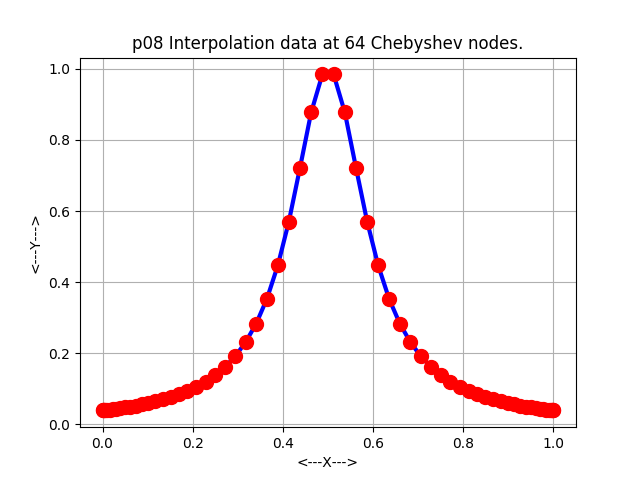
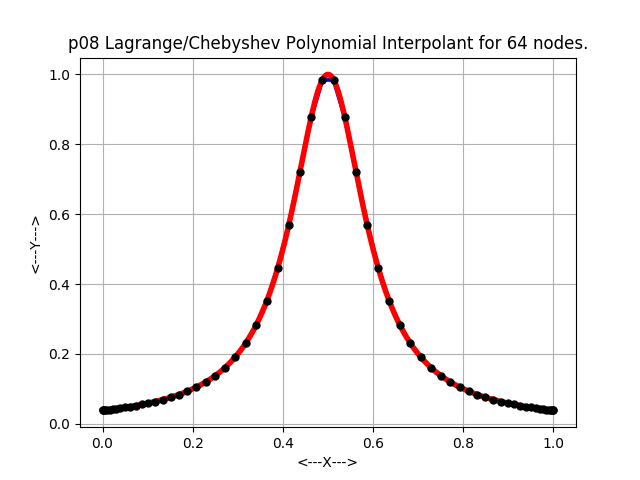
Images for problem p08:
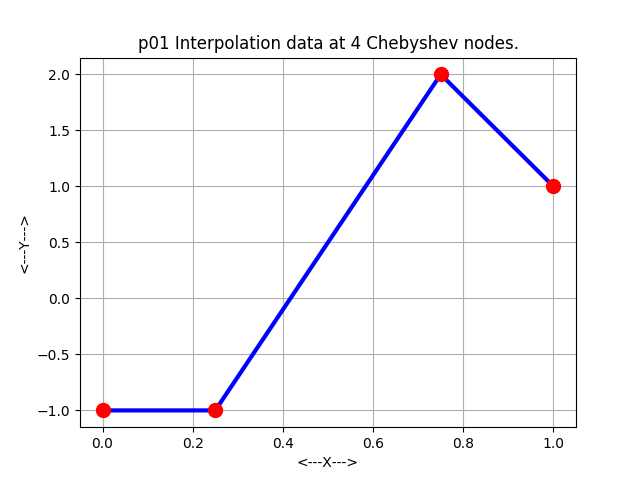
lagrange_interp_1d_test02() plots the data and Lagrange interpolant for Chebyshev spacing.
Images for Problem p02:
Images for problem p03:
Images for problem p04:
Images for problem p05:
Images for problem p06:
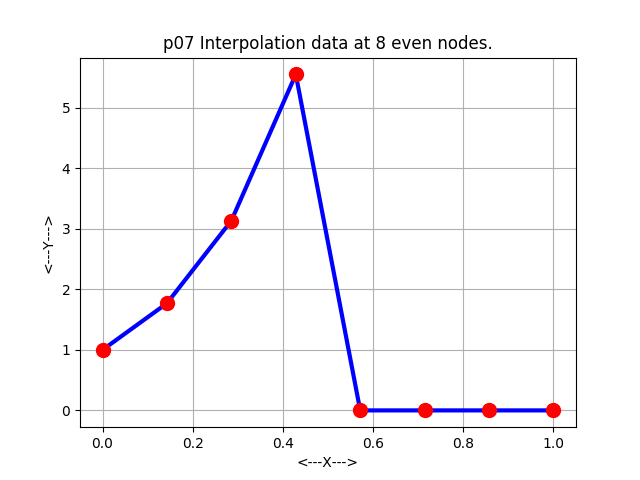
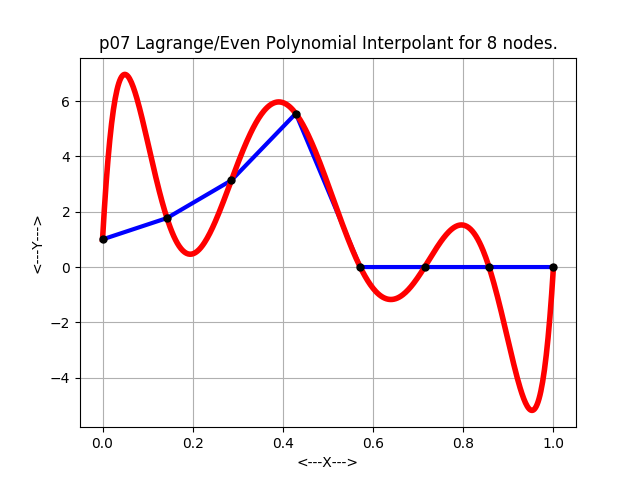
Images for problem p07:
Images for problem p08:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}