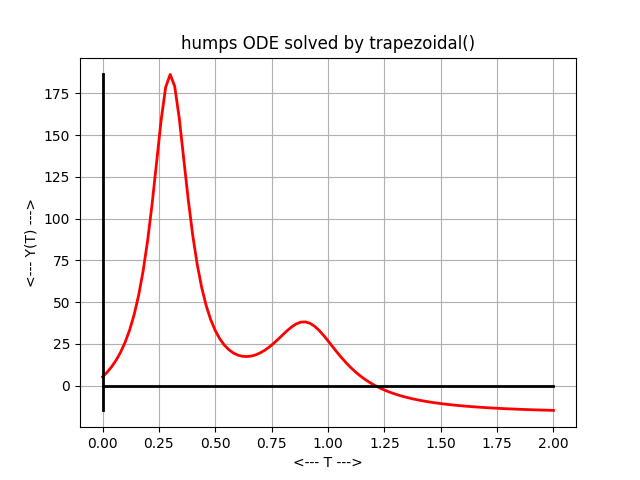
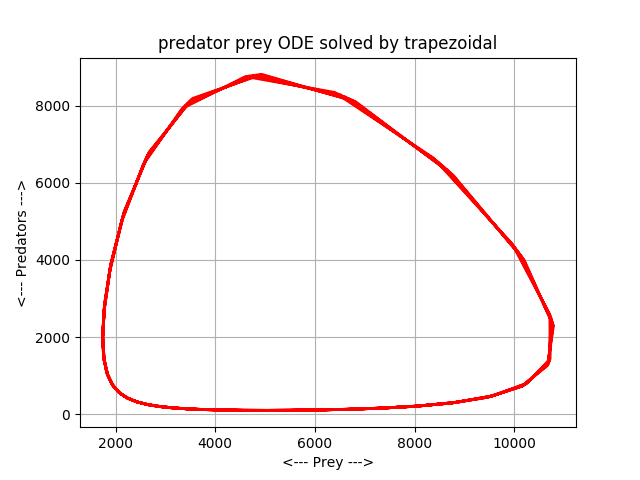
trapezoidal, a Python code which solves one or more ordinary differential equations (ODE) using the (implicit) trapezoidal method, using fsolve() to handle the implicit equation.
Unless the right hand side of the ODE is linear in the dependent variable, each trapezoidal step requires the solution of an implicit nonlinear equation. Such equations can be approximately solved using methods such as fixed point iteration, or an implicit equation solver like fsolve().
The information on this web page is distributed under the MIT license.
trapezoidal is available in a C version and a C++ version and a Fortran77 version and a Fortran90 version and a FreeFem++ version and a MATLAB version and an Octave version and a Python version and an R version.
python_ode_solver, a Python code which solves one or more differential equations (ODE) using a method of a particular order, either explicit or implicit. Some methods require a nonlinear equation solver. Some methods used a fixed stepsize, while others adapt the stepsize based on an error estimate.
{kind=link}
{kind=link}