TET_MESH_ORDER4 is a dataset directory which contains tet meshes, that is, sets of 3D points, and information arranging groups of four points into tetrahedrons.
The computer code and data files described and made available on this web page are distributed under the GNU LGPL license.
FEM2D, a data directory which contains examples of FEM files, three text files that can be used to describe many 2D finite element models;
TET_MESH, a C++ library which carries out various operations on tetrahedral meshes.
TET_MESH_DISPLAY, a MATLAB program which reads in the node and element files defining a tet mesh and displays a wireframe image.
TET_MESH_DISPLAY_OPENGL, a C++ program which reads a 3D tet mesh and displays the nodes and edges using OpenGL.
TET_MESH_L2Q, a C++ program which reads information about a 4-node (linear) tet mesh and creates data defining a corresponding 10-node (quadratic) tet mesh;
TET_MESH_ORDER10, a data directory which contains a description of a quadratic tet mesh of a set of 3D points, using a pair of files to list the node coordinates and the 10 nodes that make up each tetrahedron;
TET_MESH_ORDER10, a dataset directory which contains examples of order 10 tetrahedral meshes.
TET_MESH_QUALITY, a C++ program which computes quality measures of a tetrahedral mesh.
BOX_4x4x3 is the rectangular region [-2,2]x[-2x2]x[0,3] containing 99,620 nodes and 562,947 elements.
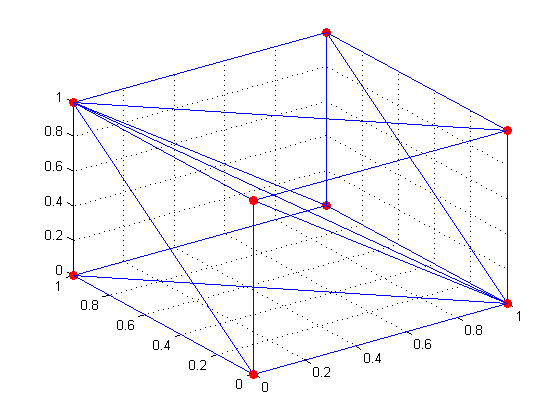
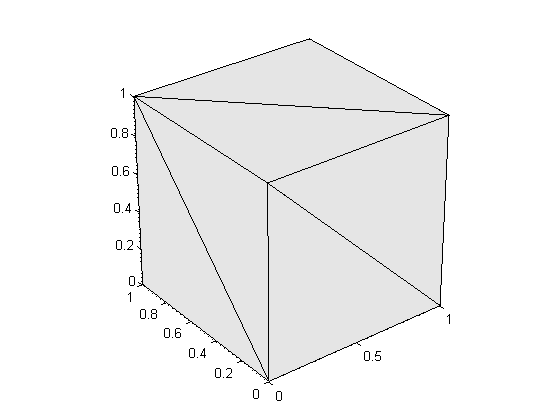
CUBE is the 8 vertices of the unit cube [0,1]x[0,1]x[0,1], defining 6 elements of equal volume but not equal shape.
CUBE_4x4x4 is 64 nodes of the cube [0,4]x[0,4]x[0,4], defining 162 elements.
CUBE_5x5x5 is 125 nodes in the unit cube [0,4]x[0,4]x[0,4], defining 384 elements.
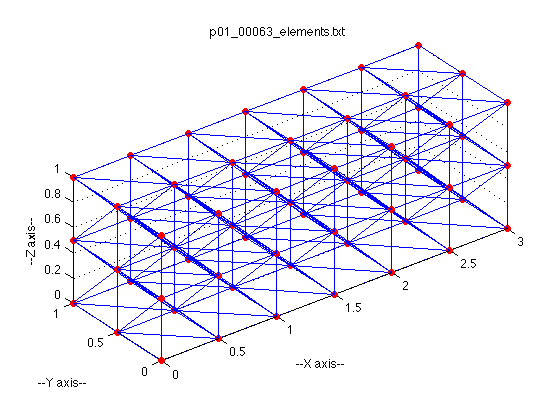
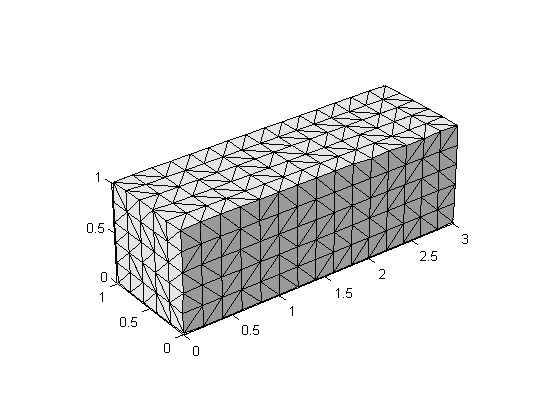
P01_00063 is the 3x1x1 channel defined by 63 nodes and 144 elements.
P01_00584 is the 3x1x1 channel defined by 584 nodes and 2482 elements.
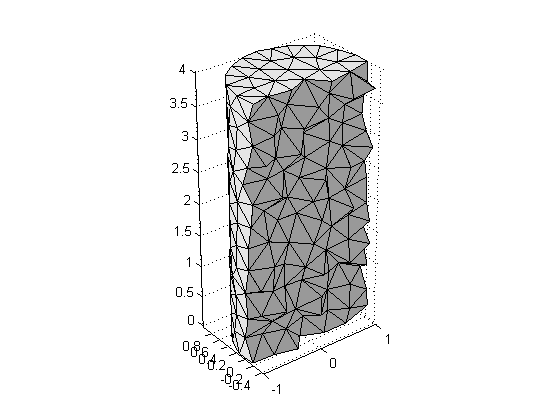
P02_00588 is the vertical cylinder defined by 588 nodes and 2373 elements.
P03_00008 is the unit cube defined by 8 nodes and 6 elements.
P03_00224 is the unit cube defined by 224 nodes and 798 elements.
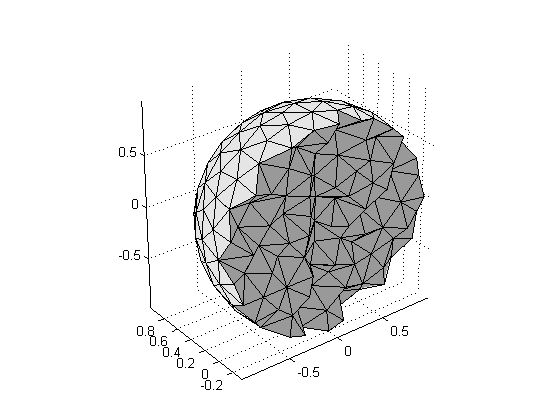
P04_00587 is the unit sphere defined by 587 nodes and 2775 elements.
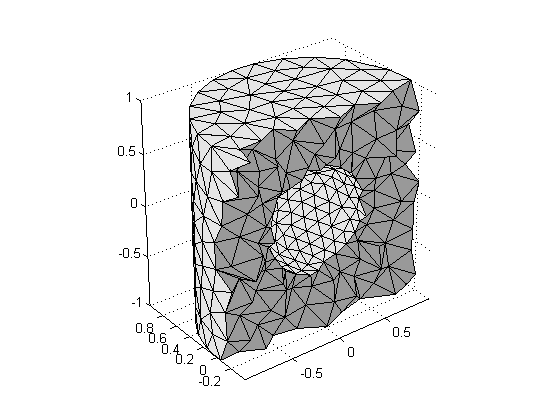
P05_01084 is the cylinder with a spherical hole defined by 1084 nodes and 4738 elements.
TETRA_REFERENCE is a mesh of a single element, the reference tetrahedron, with vertices (1,0,0), (0,1,0), (0,0,1) and (0,0,0).
TETRA_REFERENCE_REFINED is a mesh created by refining TETRA_REFERENCE into 8 subtetrahedrons of equal volume. The program TET_MESH_REFINE was used to carry this out.
TETRA_RHOMBIC is the 4 vertices of a tetrahedron, plus the 10 midside points, making a mesh of 8 elements of order 4. This tetrahedron has some nice properties under a subdivision algorithm.
TWENTY is 20 random nodes, defining 70 elements.
You can go up one level to the DATASETS directory.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}